11-26
11-9 Friction Torque Compensation Function
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
11
Adjustment Functions
11-9
Friction Torque Compensation Function
Two types of friction torque compensations can be set to reduce the influence of mechanical
frictions. One is the unbalanced load compensation that offsets the constantly applied
unbalance torque. The other is the dynamic friction compensation that changes the offset
direction in accordance with the operating direction.
Operating Conditions
You can use the function under the following conditions:
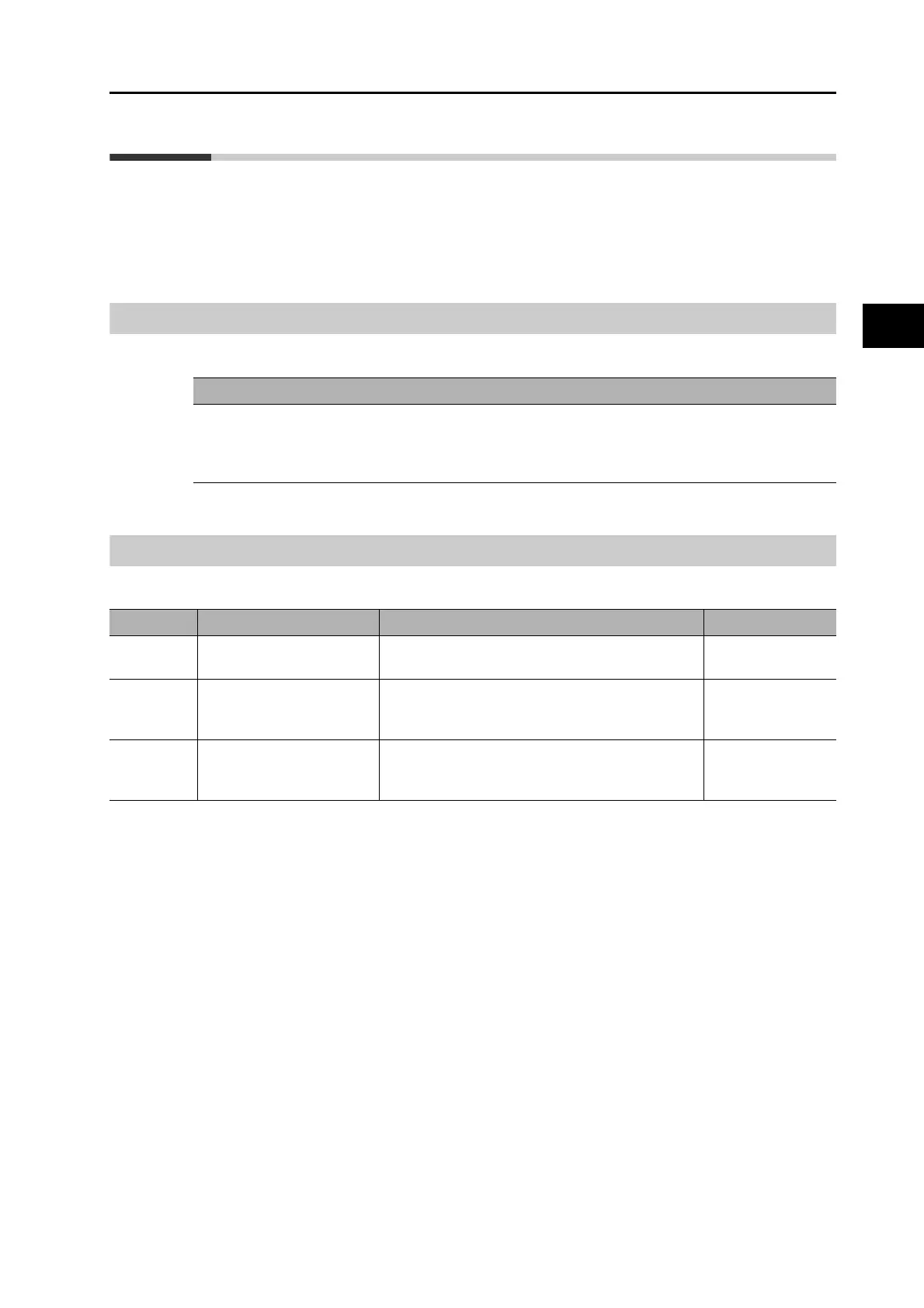
Objects Requiring Settings
The torque compensation function needs the combined settings of following three objects.
Conditions
When Servo is ON
When there is no trouble with the motor's normal rotation
When realtime autotuning function is disabled
When instantaneous speed observer function is disabled
Index Name Description Reference
3607 hex
Torque Command Value
Offset
Set the unbalanced load compensation value to
always add to the internal torque command.
page 9-38
3608 hex
Forward Direction Torque
Offset
Set the dynamic friction compensation value to add
to the internal torque command for forward
operation.
page 9-38
3609 hex
Reverse Direction Torque
Offset
Set the dynamic friction compensation value to add
to the internal torque command for reverse
operation.
page 9-38
 Loading...
Loading...
