7-15
7-5 Brake Interlock
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
7
Applied Functions
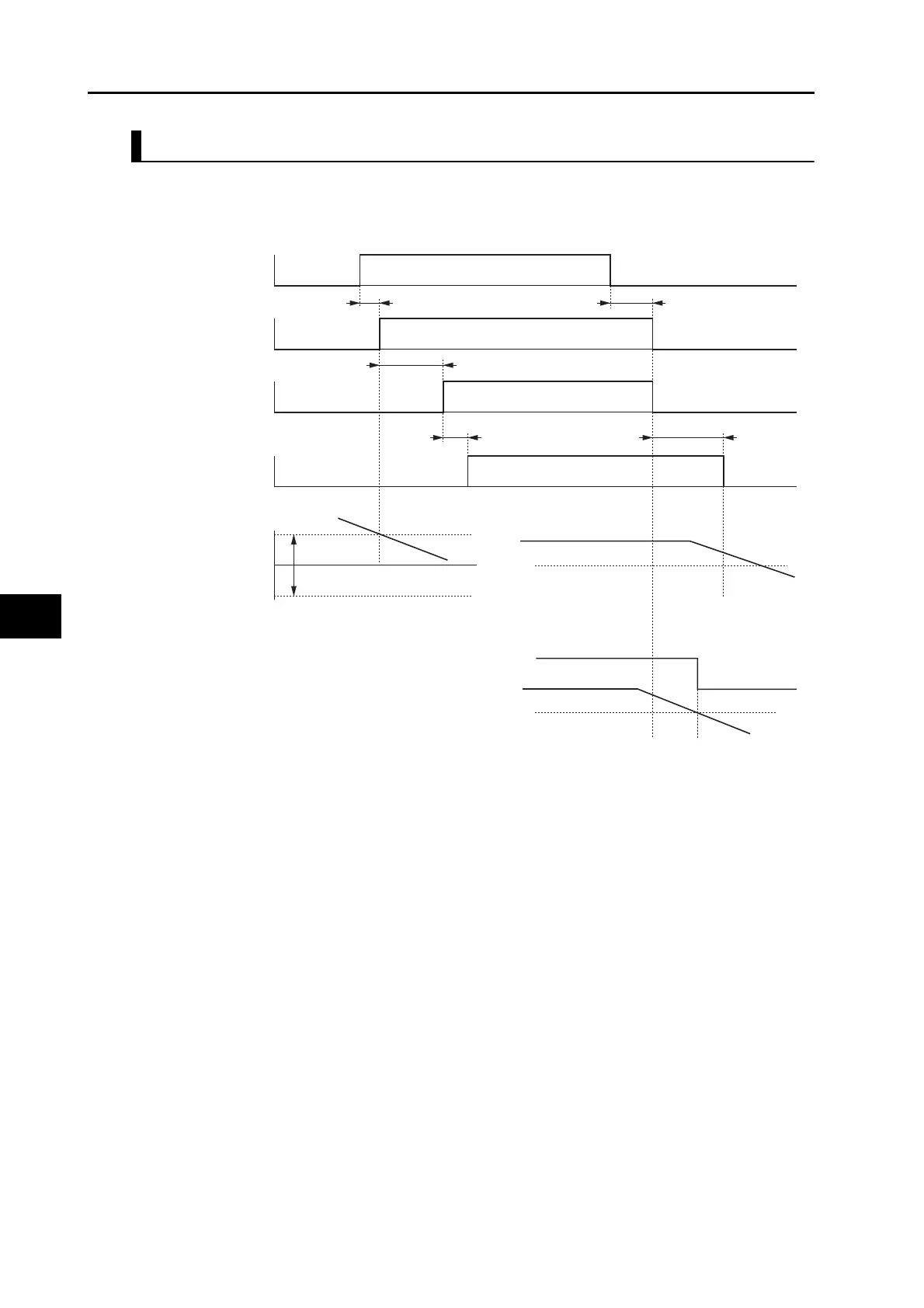
Servo ON/OFF Operation Timing When Motor Is Operating
Based on these operation timings, regenerative energy is produced if the motor rotation stops
abnormally. Accordingly, repeated operation cannot be performed. Provide a wait time of at
least 10 minutes for the motor to cool down.
*1. The servo does not turn ON until the motor rotation speed drops to approx. 30 r/min or below. If a Servo ON is
commanded during motor rotation, the Command Warning (Warning No. B1 hex) will occur. The Servo ON
command is ignored.
*2. The operation of the dynamic brake when the servo is OFF depends on the setting of the Disable operation option
code (605C hex).
*3. The Brake Interlock output (BKIR) signal is output when a release request command is received from Servo controls
or from EtherCAT communications. In the above example, there is no release request command from EtherCAT
communications. The BKIR signal is assigned to the general-purpose output (CN1).
*4. “t1” is the period until the value becomes lower than the set value on the Brake Timing During Operation (3438 hex)
or the Brake Threshold Speed During Operation (3439 hex), whichever is shorter.
Note: Even when the Servo ON Input is turned ON again while the motor is decelerating, the system does not enter
the servo ON state until the motor stops.
Servo ON/OFF
ON
OFF
Dynamic brake relay
ON
OFF
Motor power supply
ON
OFF
Brake interlock output
(BKlR)
*3
ON
OFF
*1
1 to 5 ms
Approx. 4 ms
3438 hex
Approx. 60 ms
Servo OFF Servo OFFServo ON
*1
DB engaged DB engaged
*2
DB released
Power supply
No power supply
No power supply
*2
Release request
Brake held
t1
*4
Motor rotation speed
Servo ON enabled
Approx. +30 r/min
Value set on 3439 hex
Approx. -30 r/min
Release request
Brake held
Value set on 3439 hex
BKIR
When the 3438 hex
setting is early
Brake held
When the 3439 hex
setting is early
 Loading...
Loading...
