9-7
9-2 Gain Settings
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
9
Details on Servo Parameter Objects
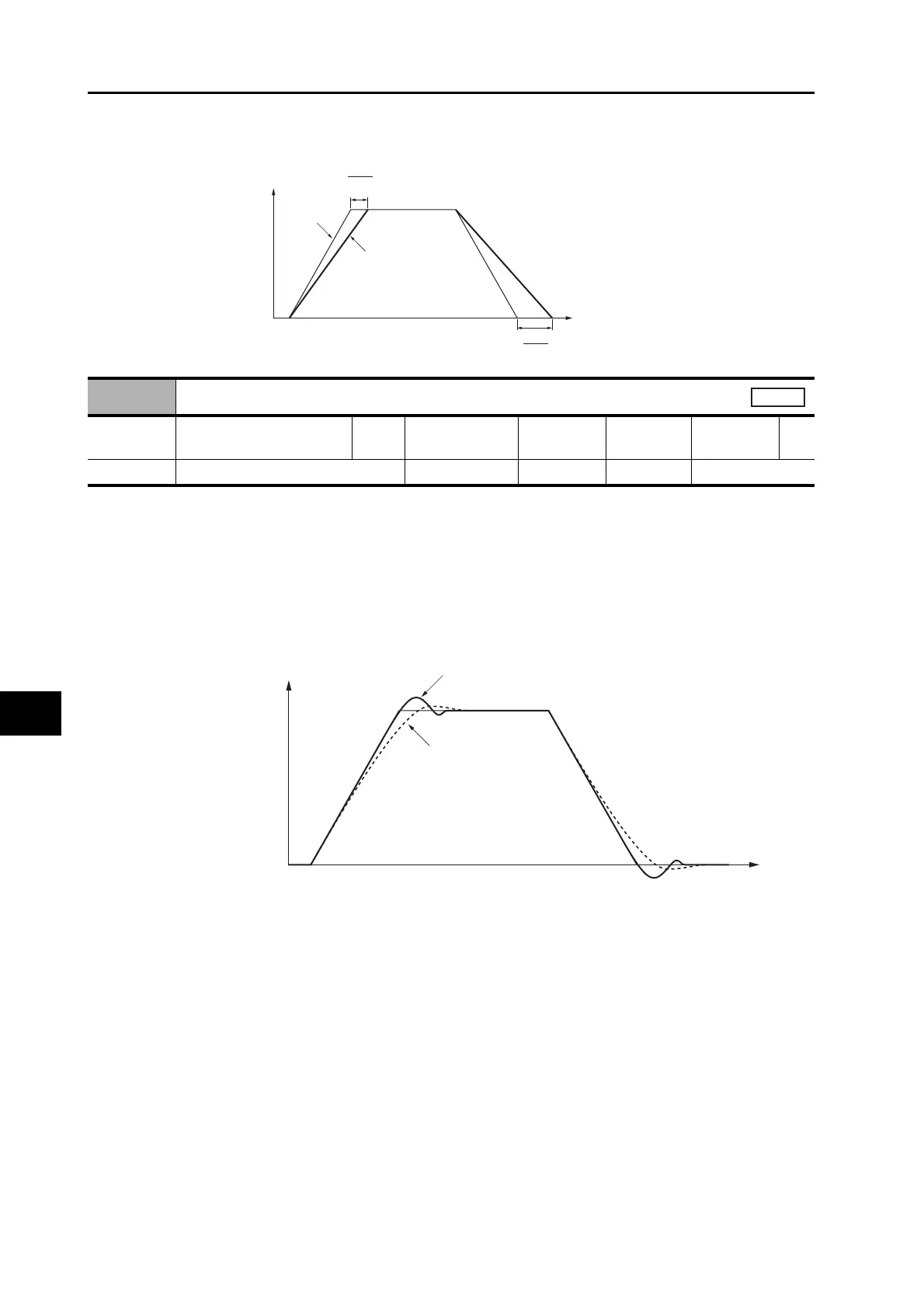
If the speed loop gain and position loop gain are optimally set, the motor operation for the
command delays 2/Kp at acceleration and delays 3/Kp at deceleration.
This object determines speed loop responsiveness.
The setting for the speed loop gain must be increased to increase the position loop gain and
improve the responsiveness of the entire servo system. Setting too high, however, may result in
vibration.
The setting unit for 3101 hex is Hz if the Inertia Ratio (3004 hex) is set correctly.
When the speed loop gain is changed, the response is as shown in the following diagram.
Kp
3
Kp
2
Motor speed
Time
Position
command
Motor operation
3101 hex
Speed Loop Gain 1
Setting
range
1 to 32767 Unit 0.1 Hz
Default
setting
270
*1
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
*1. The default setting is 180 for a Drive with 200 V and 1 kW or greater, or with 400 V.
All
Motor speed
Time
Overshooting occurs if the speed loop gain is high.
(Vibration occurs if the gain is too high.)
Speed loop gain is low.
 Loading...
Loading...
