12-71
12 Pulse Outputs
CP2E CPU Unit Software User’s Manual(W614)
12-11 Pulse Output Pattern
12
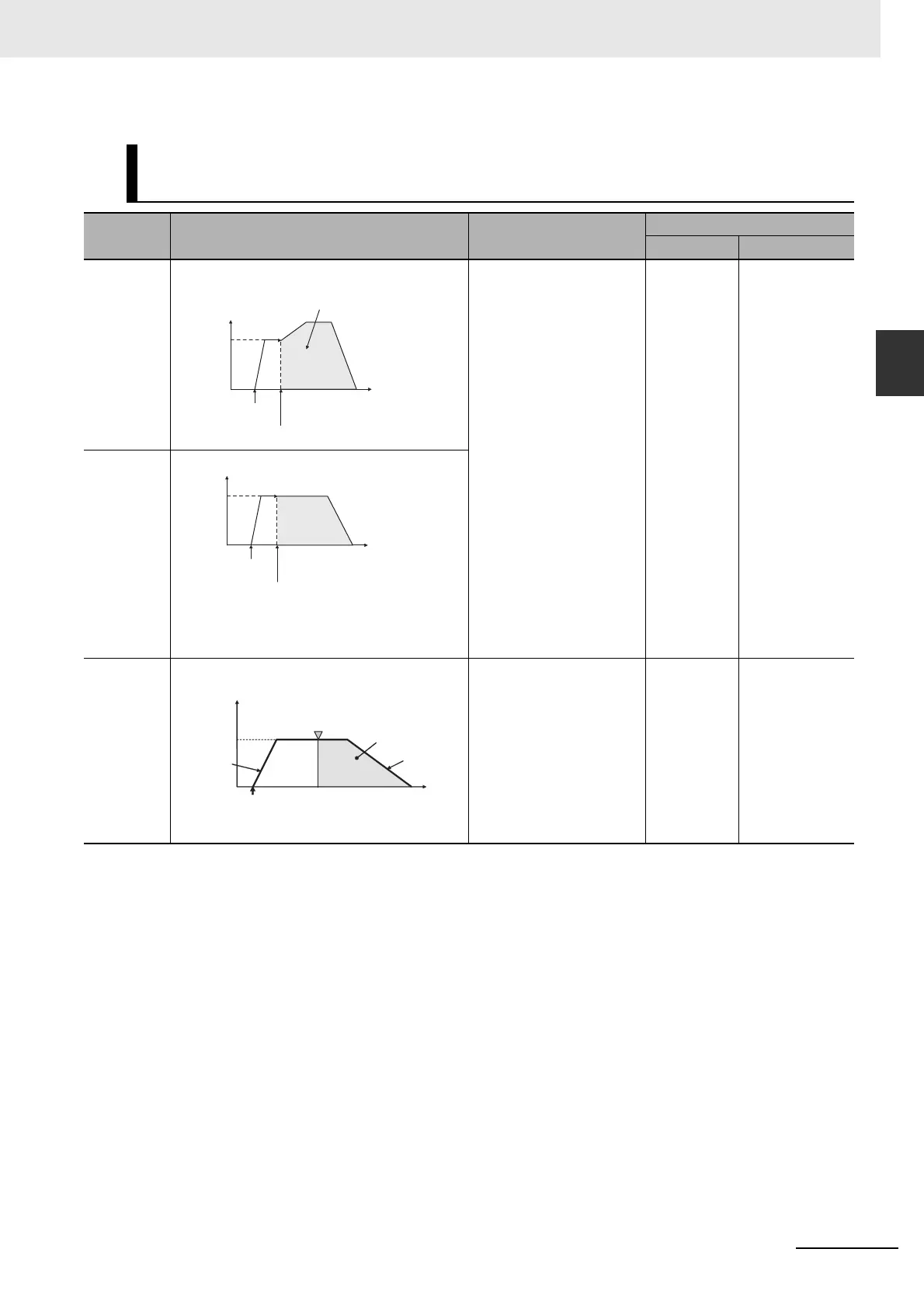
12-11-2 Positioning Control (Independent Mode)
* The starting frequency is ignored.
Switching from Speed Control (Continuous Mode) to Positioning
(Independent Mode)
Example
application
Frequency changes Description
Procedure
Instruction Settings
Change
from speed
control to
fixed dis-
tance posi-
tioning
during
operation
PLS2 can be executed
during a speed control
operation started with
ACC to change to position-
ing operation.
An error will occur if a con-
stant speed cannot be
achieved after switching
the mode. If this happens,
the instruction execution
will be ignored and the
previous operation will be
continued.
ACC
(Continuous)
↓
PLS2
• Port
• Acceleration
rate
• Deceleration
rate
• Target fre-
quency*
• Number of
pulses
Fixed dis-
tance feed
interrupt
High-speed
interrupt
feeding
When an interrupt input
occurs during speed con-
trol for the IFEED instruc-
tion, operation changes to
positioning. An interrupt
task is not used.
There is no delay for the
starting time of the inter-
rupt task, improving the
feeding accuracy.
IFEED • Port
• Acceleration
rate
• Target fre-
quency
• Pulse output
set value
• Deceleration
rate
Time
Target
frequency
Execution of ACC
(continuous)
Execution of PLS2
Pulse frequency
Outputs the number of pulses
specified in PLS2 (Both relative and
absolute pulse specification can be
used.)
Pulse frequency
Time
Present
frequency
Execution of ACC
(continuous)
Execution of PLS2 with the following settings
Number of pulses = number of pulses until stop
Relative pulse specification
Target frequency = present frequency
Acceleration rate = Not 0
Deceleration rate = target deceleration rate
IFEED executed
Pulse frequency
Time
Target
frequency
Acceleration
rate
Interrupt input occurs.
Speed
control
Position
control
Specified number
of pulses
Deceleration
rate