4
Grippers for collaborative robots
CKD Pneumatic Gripper Software Operation Method
This is an overview of the operation method for the CKD Pneumatic Gripper dedicated software. Refer to the
Robot manual and this product's Instruction Manual for details.
Software installation
Download the Plug&Play software package (TECHMAN ROBOT Inc. robot users: https://www.ckd.co.jp/english,
OMRON robot users: https://www.omron.com/global/en), follow the directions in the Instruction Manual, and
import the le.
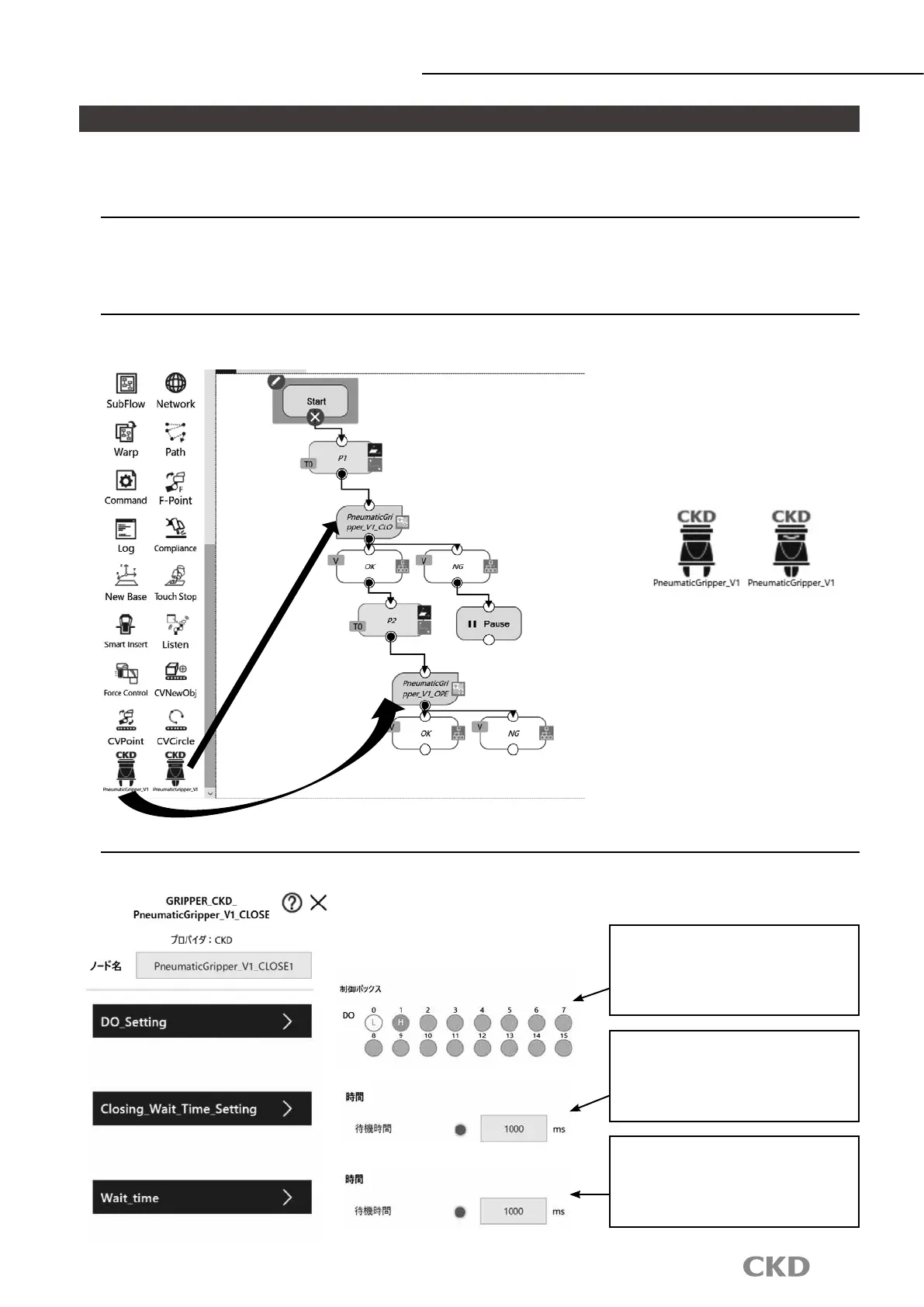
Program screen
The gripper open/close directions are shown with icons, so drag the icon to the ow edit area and set the
digital I/O.
Node screen
Set the directional control valve digital I/O setting, the gripper open/close timeout time, and the wait time after workpiece gripping.
Graphic display
The gripper open/close status and
built-in cylinder switch operational
status are shown with color changes.
Close digital I/O setting
The digital I/O setting for the directional
control valve close operation can be
set at will.
Close timeout setting
Sets the time at which, if the gripper close
time exceeds the arbitrarily set number of
seconds, an error will be displayed.
Standby time setting after closing
Sets the arbitrary standby time to
stabilize operation after closing the
gripper.
*Open time is set likewise.
Drag
Flow area
Drag
 Loading...
Loading...









