Chapter 4: Boe-Bot Navigation · Page 159
2. Let’s say that you tested your servos and discovered that it takes 48 pulses to
make a 180° turn with right-rotate. With this information, write routines to make
the Boe-Bot perform 30, 45, and 60 degree turns.
3. Write a routine that makes the Boe-Bot go straight forward, then ramp in and out
of a pivoting turn, and then continue straight forward.
Projects
1. It is time to fill in column 3 of Table 2-1:
PULSOUT Duration Combinations on
page 81. To do this, modify the
PULSOUT Duration arguments in the program
BoeBotForwardThreeSeconds.bs2 using each pair of values from column 1.
Record your Boe-Bot’s resultant behavior for each pair in column 3. Once
completed, this table will serve as a reference guide when you design your own
custom Boe-Bot maneuvers.
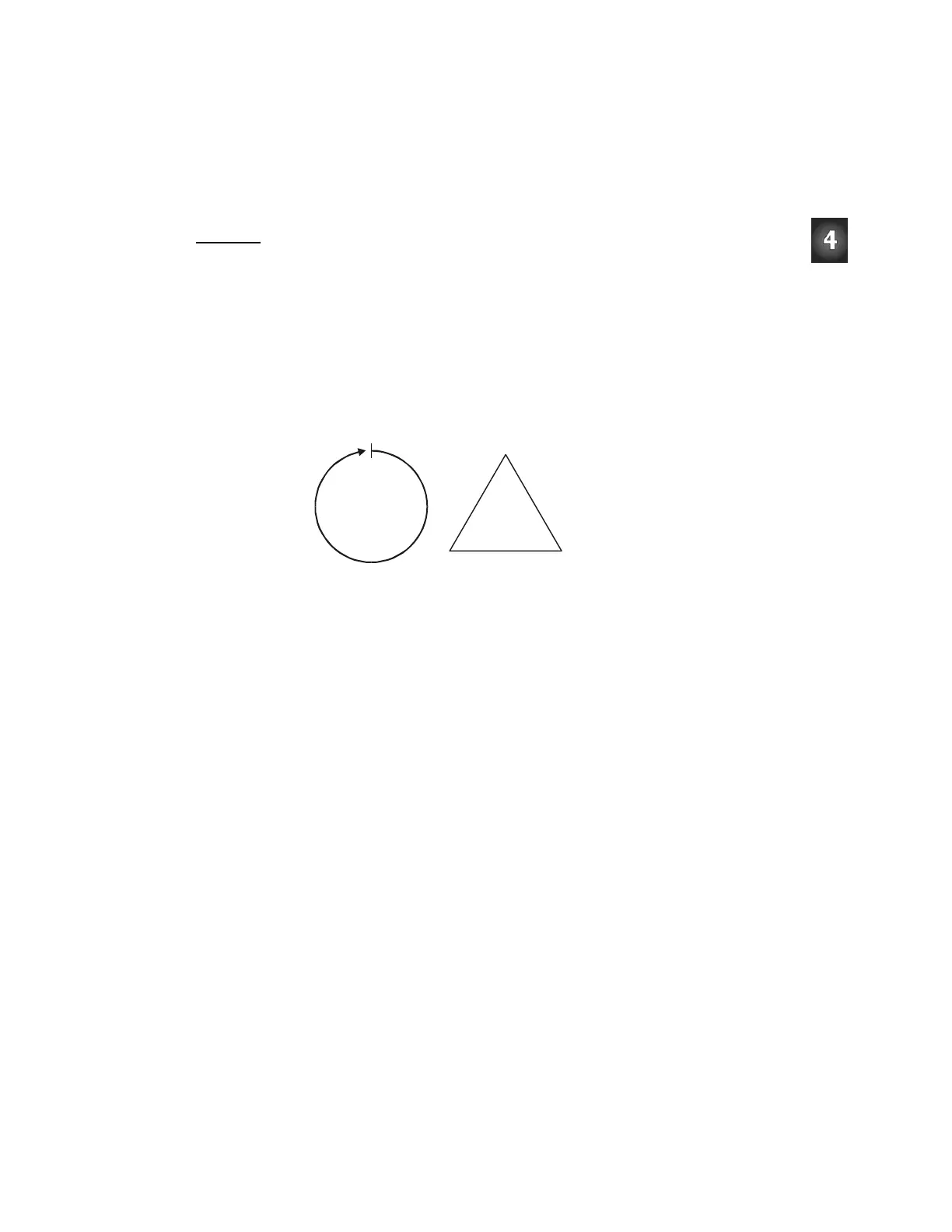
2. Figure 4-9 shows two simple obstacle courses. Write a program that will make
your Boe-Bot navigate along each figure. Assume straight line distances
(including the diameter of the circle) to be either 1 yd or 1 m.
Figure 4-9
Simple Obstacle
Courses