Chapter 8: Robot Control with Distance Detection · Page 285
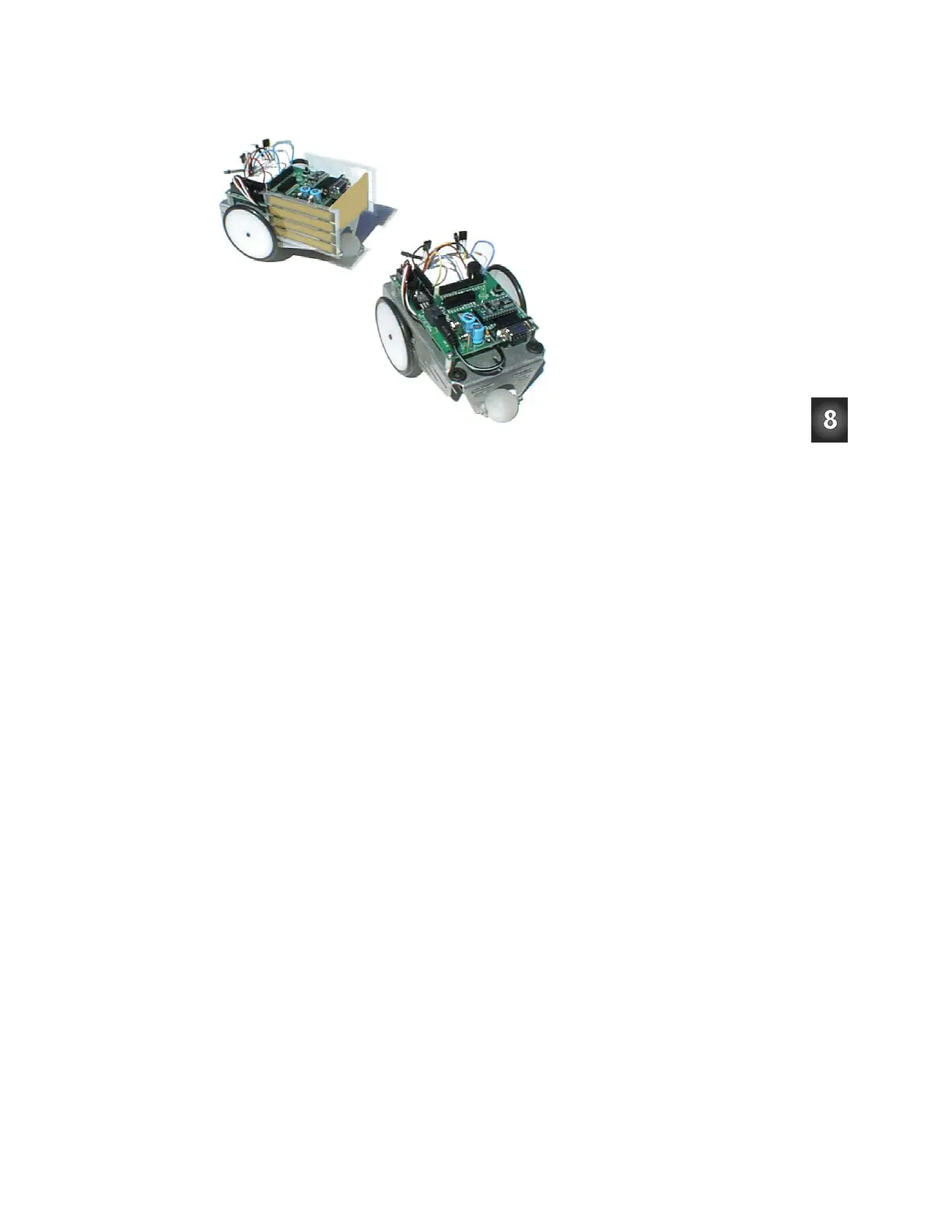
Figure 8-6
Lead Boe-Bot (left)
and Shadow Boe-
Bot (right)
√ If you are part of a class, mount paper panels on the tail and both sides of the
lead Boe-Bot as shown in Figure 8-6.
√ If you are not part of a class (and only have one Boe-Bot) the shadow vehicle
will follow a piece of paper or your hand just as well as it follows a lead Boe-
Bot.
√ Replace the 1 kΩ resistors that connect the lead Boe-Bot’s P2 and P8 to the IR
LEDs with 470 Ω or 220 Ω resistors.
√ Program the lead Boe-Bot for object avoidance using a modified version of
FastIrRoaming.bs2. Open FastIrRoaming.bs2, and rename it
SlowerIrRoamingForLeadBoeBot.bs2.
√ Make these modifications to SlowerIrRoamingForLeadBoeBot.bs2:
√ Increase all
PULSOUT Duration arguments that are now 650 to 710.
√ Reduce all
PULSOUT Duration arguments that are now 850 to 790.
√ The shadow Boe-Bot should be running FollowingBoeBot.bs2 without any
modifications.
√ With both Boe-Bots running their respective programs, place the shadow Boe-
Bot behind the lead Boe-Bot. The shadow Boe-Bot should follow at a fixed
distance, so long as it is not distracted by another object such as a hand or a
nearby wall.
 Loading...
Loading...
