VIX AE SERVO DRIVE USER GUIDE
52
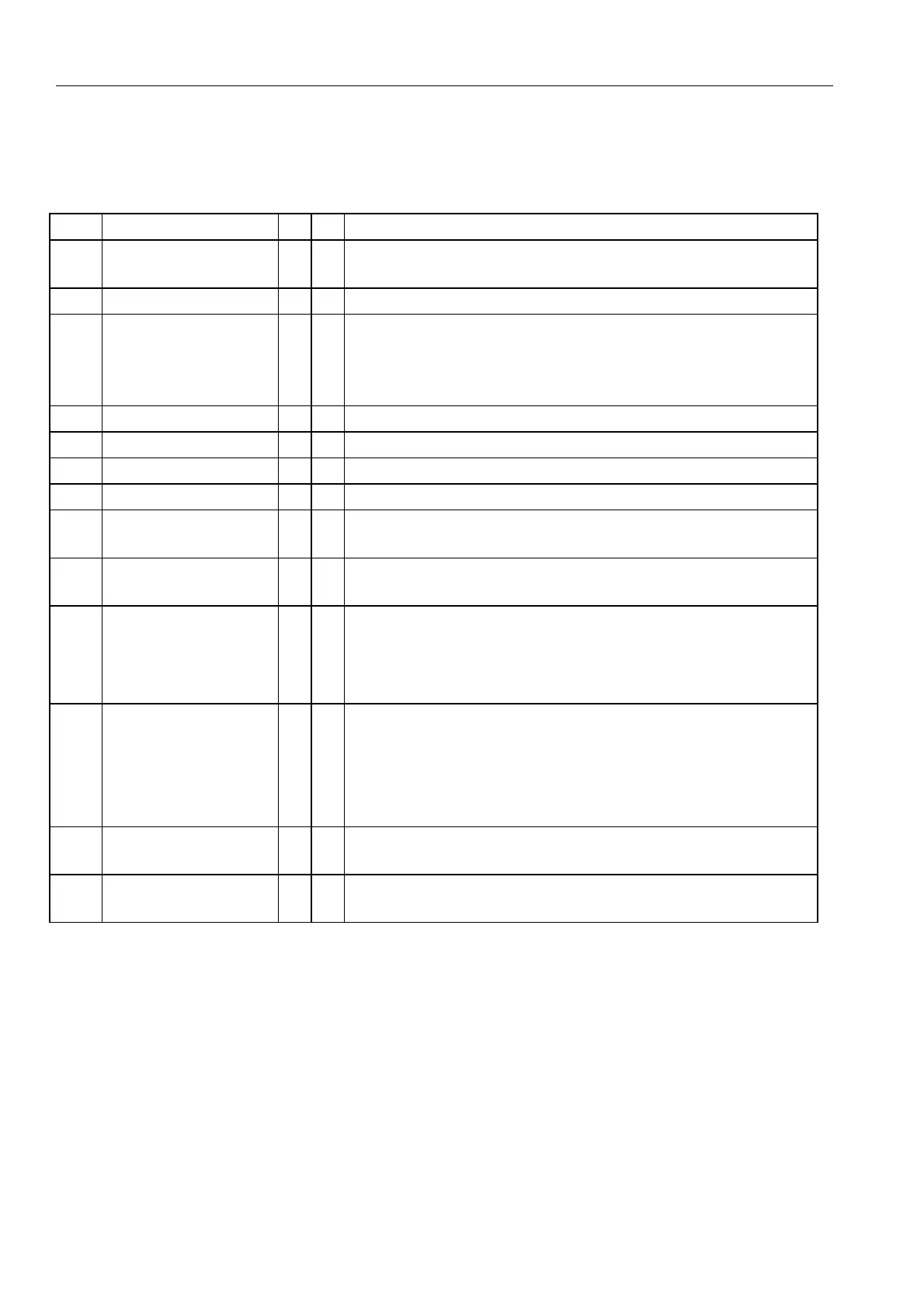
Table of System Variables
Table 4-1 lists system variables in alphabetic order together with their read/write status and
range of values stored.
Var Name R W Range/default value
AB Analogue
Deadband
Y Y 0 to +255, default = 0
AI Analogue Input Y N -2047 to +2047
AM Analogue Monitor
Mode
Y Y 0 = torque monitor (default)
1 = velocity monitor
2 = outputs a triangular waveform –10V to +10V
amplitude, with a 1 second period
AO Analogue Offset Y Y -2047 to +2047, default = 0
BR BAUD rate Y Y 9600 (default) or 19200 bits per second
CL Current Clamp Y Y 1 to 100% (default) of peak drive current
DF Drive Fault status Y N See reporting of drive faults DF1,2,3 & 4
EI Encoder Input Y Y 0=step/dir (default), 1=cw/ccw, 2=quad ABZ, de-
energise drive to change
EO Encoder signal
Output
Y Y 0=step/dir, 1=cw/ccw, 2=quad ABZ (default), de-
energise drive to change
ES Energise Sense Y Y Sets the sense of the external energise/energise_bar
signal
0=low signal to energise (default)
1=high signal to energise
EX Comms. Response
Style & Echo
Control & Physical
Interface (RS232)
Y Y 0= speak when spoken to, echo off, RS232
1= speak whenever, echo off, RS232
2= speak when spoken to, echo on, RS232
3= speak whenever, echo on, RS232 (default)
FT Filter Time
constant
Y Y 0 to 255 used to filter high gain systems, measured in
arbitrary units, default = 0
GF Feedforward Gain
(tracking)
Y Y 0 to 1023 default = 5
Table 4-1. List of System Variables
 Loading...
Loading...