2. System Overview
Page 17 of
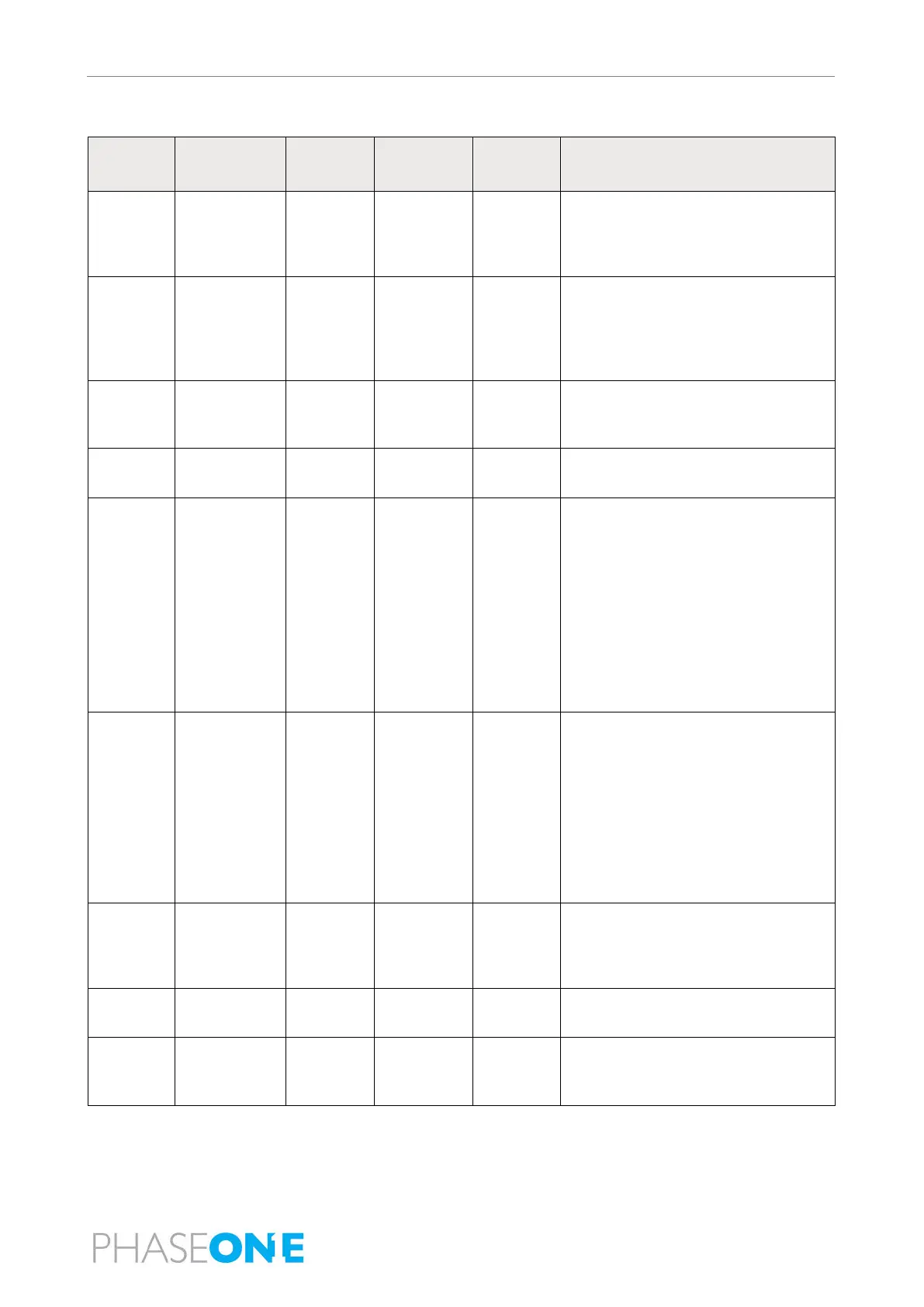
Table 2. Dataflow for PAS 280 with GSM 4000 Stabilizer
Applanix
GSOF
POS AV
Controller
GSOF
over
TCP/IP
Applanix POS AV sends NMEA data
required by iX Flight to calculate
aircraft position and flight director
trigger
I/O
discrete
iX Flight (in iX Controller) calculates
when to take a picture (based on
NMEA/GSOF data received from
Applanix POS AV) and issues a
trigger.
Exposure
Pulse)
POS AV
Camera sends an event input to the
POS AV when the picture is taken.
POS AV
POS AV sends event metadata to
camera for image metadata
(ongoing)
pass
POS AV
• iX Flight (in iX Controller)
calculates Start of Line and
before reached, sends "Stab"
command to Applanix POS AV
(for transfer to SOMAG DSM 400
stabilizer).
• iX Flight (in iX Controller)
calculates End of Line and after
reached, sends "Man" command
to Applanix POS AV (for transfer
to SOMAG DSM 400 stabilizer).
(ongoing)
pass
POS AV
GSM 4000
stabilizer
• Applanix POS AV sends angle
data to SOMAG GSM 4000
stabilizer for stabilization.
• Applanix POS AV sends "Stab"
command (from iX Flight) to
SOMAG GSM 4000 stabilizer.
• Applanix POS AV sends "Man"
command (from iX Flight) to
SOMAG GSM 4000 stabilizer.
(ongoing)
GSM
4000
stabilizer
POS AV
SOMAG DSM 400 stabilizer platform
sends GIM01 message with platform
angles to the POS AV for registration
in T04 files.
(ongoing)
Controller
Images taken by camera transferred
to iX Controller SSD.
(ongoing)
iX Flight sends line number and
image in the line number to iX
Capture for tagging image filenames.