40
a. Do the frequencies match on the base and rover? The frequencies must match, not just the channel
numbers.
b. Does the radio protocol match?
c. Does the “Message Type” match on the Base and Rover? Typically they are set to “RTCM V3.2”
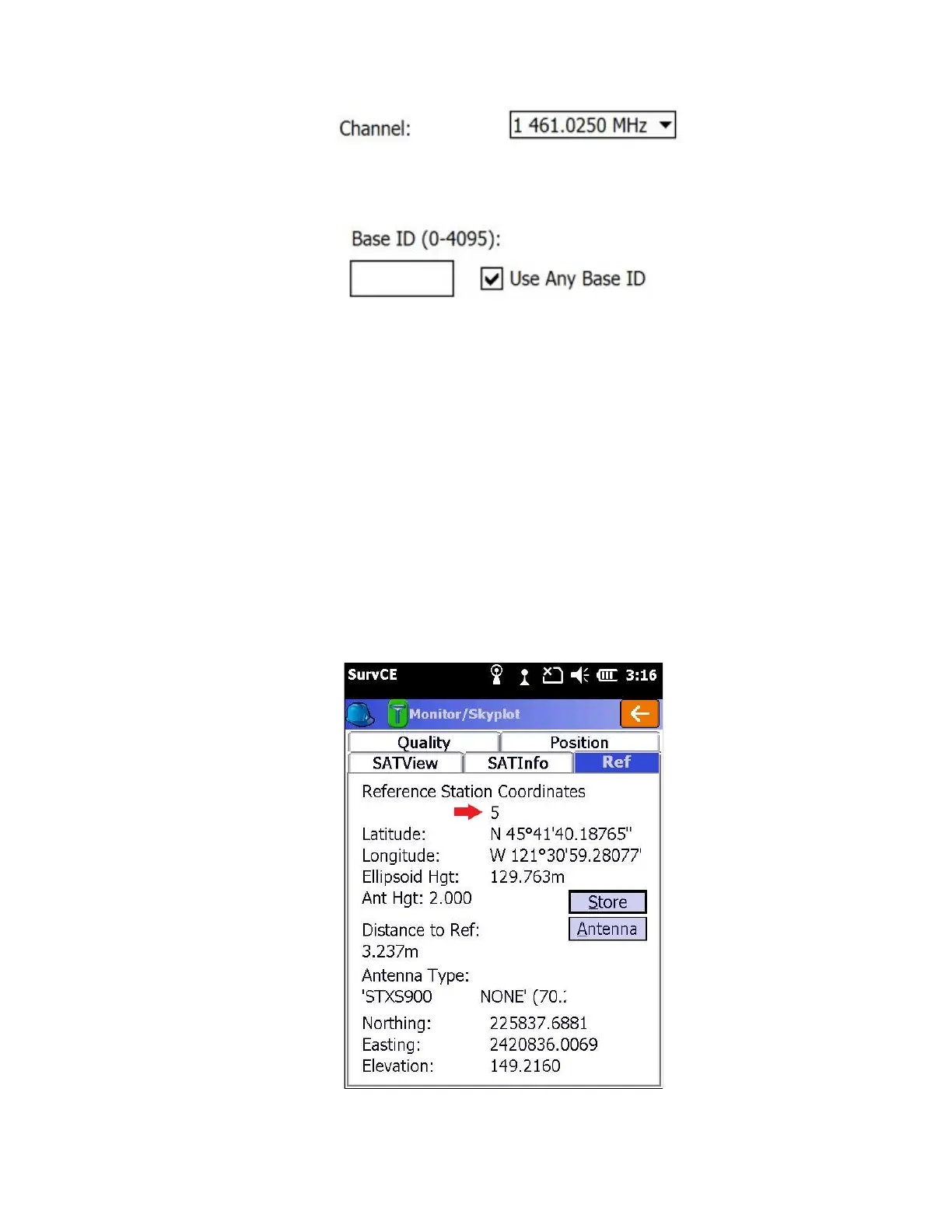
d. Is the Rover’s “base ID” set to “Use Any Base ID?
e. Do both the Base and Rover have UHF antennas attached? (If base and rover are too close, less than 20’,
you may need to remove the UHF antenna from the rover.)
f. Is there someone else using the same frequency? Either Voice or Data in use by others may block your base
from transmitting corrections
Status = “FLOAT” → If the Rover reports ‘Float’ then corrections are being received however the GNSS engine cannot
resolve ambiguities to Fix the solution.
1. Extremely long baseline distances will keep the Rover from Fixing
2. Is the receiver’s view of the sky open and unimpeded? Heavy canopy or extremely bad multipath will keep the
receiver from Fixing.
3. Is there a chance that the rover is receiving corrections from someone else’s base or that another base is keeping
your base from transmitting? You can debug this by looking at the ‘Ref’ tab.
Is the ‘Distance to Ref’ correct for your base? Is the reference station number correct for your base?
4. If the Rover is FLOAT, but never fixes, the base position could be 100 meters from the actual base location.