Model
1000
Installation and Operation Manual
Page
17
OFFICIAL 6/1/2001
H
OW
D
O
I …
CONNECT STANDARD CONTROL CIRCUITS?
If you are using an output contactor or dynamic
braking, see page 15
.
The table on the opposite page lists the functions,
connections and descriptions of the control circuits of the
Model 1000. Read the descriptions of the operations of
these circuits carefully, since there are some differences
between operation in analog and digital modes.
The control circuits of the POWERTEC Brushless DC
Drive Models 1000 and 1000A motor controls operate on
48 VDC. This results from using the positive and negative
24 VDC unregulated power supplies. Using 48VDC helps to
balance the load of relays and other devices on the
supplies.
The maximum current from each of the raw supplies is
50 milliamps. Due to this supply limitation, you must use an
external supply when you use several external relays.
THE POWER SUPPLIES OF THE MODELS 1000 AND
1000A SHOULD NOT BE USED FOR EXTERNAL
EQUIPMENT! We make an optional power supply (part #
127-101) available for additional 24 VDC power.
It is possible to operate the control circuits with a
variety of devices. Standard operator devices are O.K.. The
current flowing through these devices is very small. When
locating pushbuttons more than 30 feet away from the drive,
you should consider using 120 VAC control circuits.
There is a desire in some cases to place a jumper
across the Emergency Stop terminals, rather than to install ESTOP buttons. Because the drive has a
ramp to stop capability, this could set up an UNSAFE situation. IT IS STRONGLY RECOMMENDED
THAT AN EMERGENCY STOP BUTTON (or an ESTOP relay) BE CONNECTED TO THE DRIVE! This
should be of the MAINTAINED CONTACT TYPE.
T
HE MOTOR THERMAL MUST BE USED TO
PROPERLY
PROTECT THE MOTOR
!
You can use the "two-wire" control method by connecting a contact or switch between terminals 7
and 4 on TB2. Leave off the RAMP STOP and START buttons. This DOES NOT disable the RAMP STOP
function. The only way to disable the RAMP STOP function is removing the RAMP STOP jumper.
The RAMP STOP function in the analog mode shorts the analog reference input to zero. This causes
the motor to decelerate to zero speed before shut-down. In digital mode, you must reduce the external
frequency to zero, or the RAMP STOP circuitry will not function.
Note that the JOG function OVERRIDES the RUN function. If you activate the JOG input while the
RUN mode is in operation, it will change the motor speed to JOG speed.
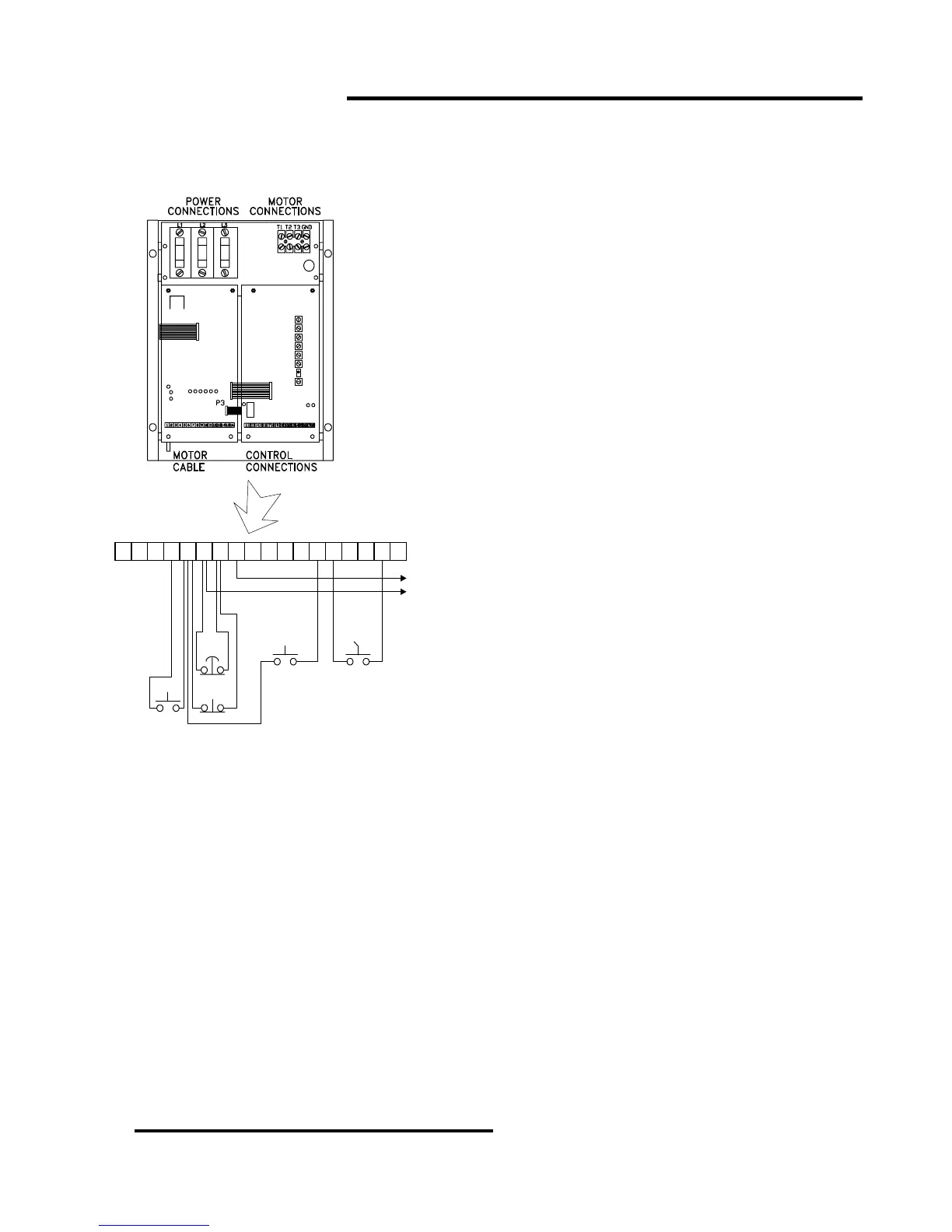
RAMP
STOP
EMER
STOP
TO
MOTOR
THERMAL
TB2
16151413121110987654321 1817
START
JOG
FWD REV