48 49
L’accès au fonctionnement normal est indiqué par l’allumage des deux led èche sur le panneau.
La protection se remet en fonction lorsque l’on active la modalité faible consommation, ou au moment de l’extinction du contrôleur.
5.2.4.2.2 RETABLISSEMENT APRES ALARME
Le contrôleur peut se trouver dans une condition d’alarme pour deux raisons (la condition d’alarme est indiquée par le led rouge
clignotant et par l’impossibilité de transmettre des commandes au moteur) :
• une commande au moteur est présente mais il n’y a pas de retour du signal compte-pas ;
• une commande au moteur est présente, il y a un retour du signal compte-pas, mais le capteur de n de course est soumis
à une pression.
La condition d’alarme est remise à zéro en éteignant et en rallumant le contrôleur. Si ceci est eectué sans avoir éliminé la cause, la
condition d’alarme sera de nouveau activée au premier mouvement du lit.
Si en revanche l’opérateur réussit à déterminer et à résoudre la cause, la condition d’alarme sera automatiquement remise à zéro.
5.2.4.2.3 ALARME POUR ABSENCE DE SIGNAL COMPTE-PAS
Cette condition d’alarme est indiquée par le clignotement rapide du led rouge d’alarme (la vitesse de clignotement est une demi-
seconde allumé et une demi-seconde éteint).
Les causes peuvent être :
• Rupture du l de branchement du compte-pas ;
• Contact dans l’un des connecteurs détendu ;
• Connecteur mal inséré ;
• Dommage dans le moteur.
AVEC LE RETABLISSEMENT DE CETTE ALARME, UNE FOIS LA CAUSE DU PROBLEME RESOLUE, L’ON PEUT ETEINDRE ET RALLU-
MER LE CONTROLEUR, OU FAIRE TOURNER LE MOTEUR A LA MAIN EN ACTIONNANT LA CLE MALE SIX PANS DEDIEE SITUEE
SUR LE MOTEUR. DANS LE DEUXIEME CAS, LORSQUE LE CONTROLEUR DETECTERA QUE LE MOTEUR TOURNE, LA CONDITION
D’ALARME SERA REMISE A ZERO ET LE CONTROLEUR RECOMMENCERA A FONCTIONNER.
Les versions du lot “ Lotto – 06-11/001 “ reconnaissables aussi par le panneau de commande où il y a un petit trou à côté de
la LED vert avec le symbole de la clé, donnent la possibilité de remettre à zéro la centrale de commande en appuyant sur la
touche « reset » à l’intérieur du trou dans le panneau de commande Fig. 4
5.2.4.2.4 ALARME POUR SIGNAL DE FIN DE COURSE QUI RESTE ACTIF
Cette condition d’alarme est indiquée par le clignotement lent du led rouge d’alarme (la vitesse de clignotement est de deux secondes
allumé et deux secondes éteint).
Les causes peuvent être :
• Le capteur de n de course continue à subir une pression ;
• Rupture du l de branchement ;
• Contact d’un des connecteurs détendu ;
• Connecteur mal inséré
Le rétablissement de cette alarme, une fois la cause du problème résolue, est automatique. Par exemple, si le capteur avait continué à
subir une pression, une fois que cette pression s’arrête, la remise à zéro de la condition d’alarme a lieu. Ou, si le problème était causé par
une rupture du câble, une fois rétabli, la remise à zéro automatique de la condition d’alarme aura lieu.
5.2.4.2.5 ALARME POUR BLOCAGE DE SECURITE
Pour garantir la sécurité, pendant que le véhicule roule le lit peut être attaché avec des ceintures dédiées. Ces ceintures ont à l’in-
térieur un contact normalement fermé qui peut être utilisé pour distinguer l’état de « ceinture attachée » ou non. Le branchement de
ces dispositifs est présenté sur la g. 3, indiqué par les mots « sécurité ceinture ».
ATTENTION ! Faire arrêter toujours le lit dans le point tout en haut avant d’insérer les ceintures de sécurité. En cas d’inobser-
vance de cette norme, le point d’arrêt plus bas pourrait subir de modications.
Les diérents modèles ont été conçus et fabriqués de façon à réduire au maximum ou éliminer les risques liés à l’écrasement et aux
cisaillements ; il faut en tous les cas rappeler que les risques liés au mouvement des dispositifs de levage pour lit sont presque nuls étant
donné les forces d’écrasement réduites.
NE PAS ACCÉDER AUX PARTIES DU DISPOSITIF DE LEVAGE POUR LIT
LORSQU’IL EST EN MOUVEMENT.
5.3 ENCODER MÉCANIQUE
BRANCHEMENT DE LA CARTE
La carte est un contrôleur équipé avec:
- alimentation 12Vdc, 25A max;
- entrées pour l’actionnement;
- sortie pour le moteur 12 Vdc, 25A max, avec contrôle de la polarité
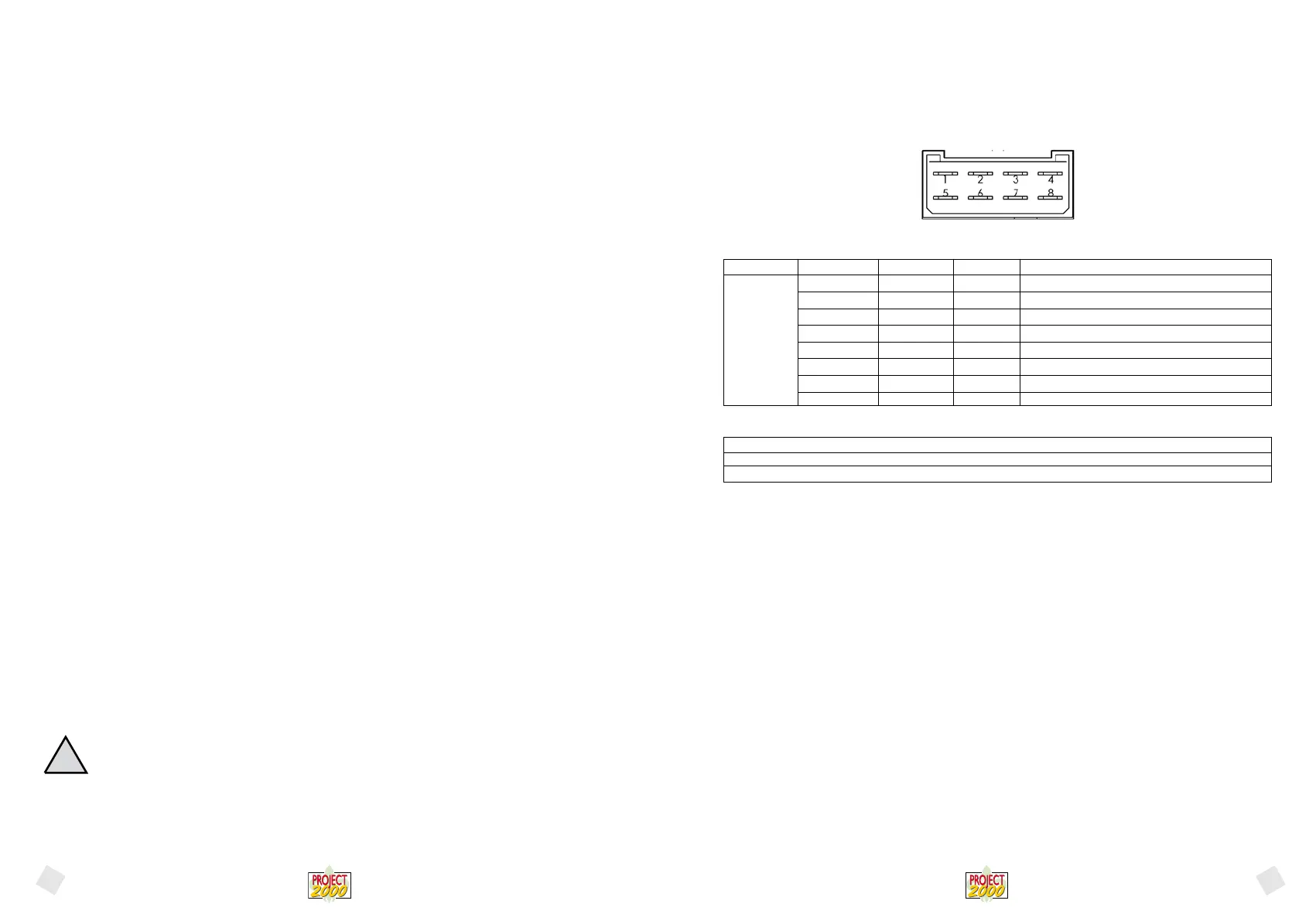
(C-1) FIG. 1 – BRANCHEMENT CONTACTES VUE CÔTÉ CONTACTE
- Alimentation
TENSION D’ALIMENTATION CC (nominale) : 12Vcc
TOLÉRANCE : – 10% / + 20% (* note)
TENSION D’ALIMENTATION CC (MIN÷MAX) : 10,8 ÷ 14,4 Vcc
(* note) La valeur indiquée tient compte des caractéristiques moyennes du moteur et de la charge de travail qu’il devrait supporter.
La valeur indiquée est donc la valeur minimale à laquelle le fonctionnement du dispositif est garanti lorsqu’il est soumis à la charge
maximale déclarée.
En référence à la Fig. 1 la tension d’alimentation doit être appliquée aux bornes 4 et 8 du connecteur 8 pôles faston, en prenant soin de
brancher le pôle positif sur la borne 2 et la masse sur la borne 4.
5.3.1 PROCEDURE DE MONTAGE ET CONNEXION DU MODULE ENCODER
Rotation standard du moteur (L’axe des ceintures tourne dans le sens de la èche imprimée sur le couvercle noir en plastique)
Connecter les ls ORANGE au n de course pour la descente de l’encoder mecanique, connecter les ls JAUNES au n de
course pour la remonte.
Rotation inversée du moteur (L’axe des ceintures tourne dans le sens opposé par rapport à la èche imprimée sur le couvercle
noir en plastique)
Sur le panneau de commande, invertir le l de couleur orange avec le l jaune.
Connecter les ls jaunes au n de course pour la descente de l’encoder mécanique, connecter les ls de couleur orange au n
de course pour la remonte
1. Pendant la préparation du lit, après avoir donné deux tours de pretensionnement à la ceinture sur l’axe (on est donc à peu prés
dans le point le plus bas de descente du lit) , positionner le support de l’encoder mécanique et introduire le manchon leté
dans l’axe. Vérier la rotation de l’axe pendant la descente du lit et par conséquence le sens de déplacement de la languette
anti-rotation, positionner sur le support de l’encoder mécanique, l’interrupteur de n de course pour la descente sur le coté où
se déplace la languette anti rotation pendant la descente du lit et le xer par serrage de l’écrou de 3 mm. Faire attention que le
manchon sur l’axe soit xé dans la position correcte, c’est-à-dire que la languette doit avoir l’espace nécessaire pour se déplacer
dans la fente du support de l’encoder pour toute la remonte du lit et que l’embout sur la vis ait le letage susant pour couvrir
la course de la remonte du lit.
2. Faire monter le lit pour quelques centimètres puis le faire descendre et vérier l’exact point d’arrêt ; s’il ne corresponde pas au
point d’arrêt souhaité, desserrer l’écrou de 14 mm qui bloque le bouton, faire tourner le bouton et essayer en faisant remonter et
descendre le lit. Répéter l’operation, si nécessaire, jusqu’au point souhaité. Bloquer l’écrou de 14 mm.
Sérigraphie ID logique Plage Bornes Caractéristiques - Description
GND GND CN1 - 8 Pôle négatif alimentation
MOT2 0 - 12Vcc CN1 - 7 Moteur (GRIS)
- Non utilisé CN1 - 6 Non utilisé
F.C. (C-5) CN1 - 5 Fin de course (C-5) (ORANGE)
+12 12Vcc CN1 - 4 Pôle positif alimentation
MOT1 0 - 12Vcc CN1 - 3 Moteur (MARRON)
- Non utilisé CN1 - 2 Non utilisé
F.C. (C-4) CN1 - 1 Fin de course (C-4) (JAUNE)
(C-1)
!
Français
Français
 Loading...
Loading...