Rockwell Automation Publication PFLEX-AP005A-EN-P - October 2010 43
Drive Selection Considerations Chapter 1
Table 20 - PowerFlex 753 Drive TB3 Terminal Designations
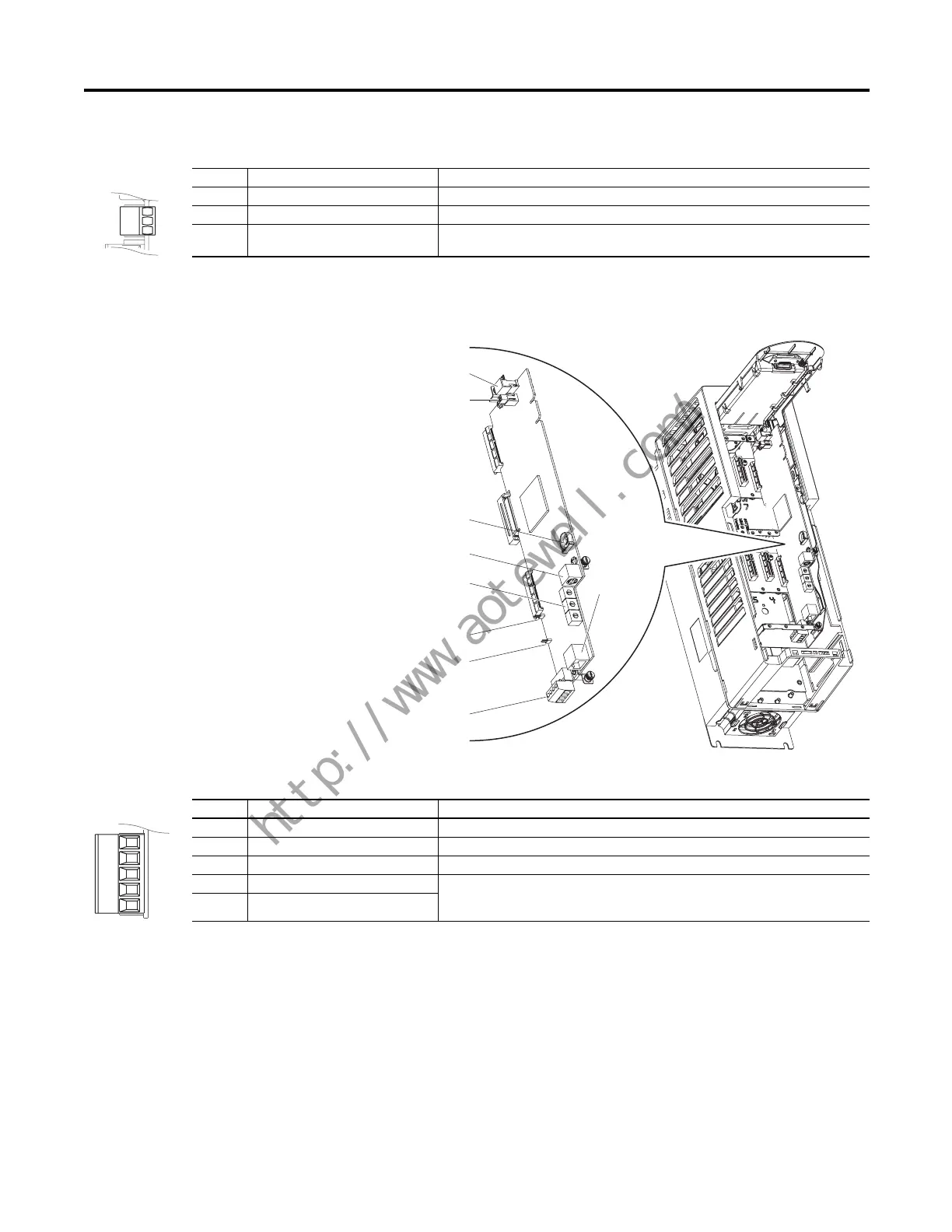
PowerFlex 755 Drives Main Control Board I/O
Table 21 - PowerFlex 755 Drive TB1 Terminal Designations
Terminal Name Description
Di 0dc Digital Input 24V DC Connections for DC power supply
Di C Digital Input Common Digital input common
Di 0ac Digital Input 120V AC Connections for AC power supply
Di 0dc
Di C
Di 0ac
HIM Connector
Fan Connector
Battery Receptacle
DPT Port 2
Embedded EtherNet/IP
(1)
Address Selectors
Embedded
EtherNet/IP
(1)
Connectors
TB1
J1 ENABLE Jumper
J2 SAFETY Jumper
Terminal Name Description
Di 0ac Digital Input 120V AC Connections for AC power supply
Di C Digital Input Common Digital input common
Di 0dc Digital Input 24V DC Connections for DC power supply
+24V +24 Volt Power Connections for drive supplied 24V power
24VC 24 Volt Common
Di 0ac
Di C
Di 0dc
+24V
24VC
 Loading...
Loading...








