EP Series User Manual
35
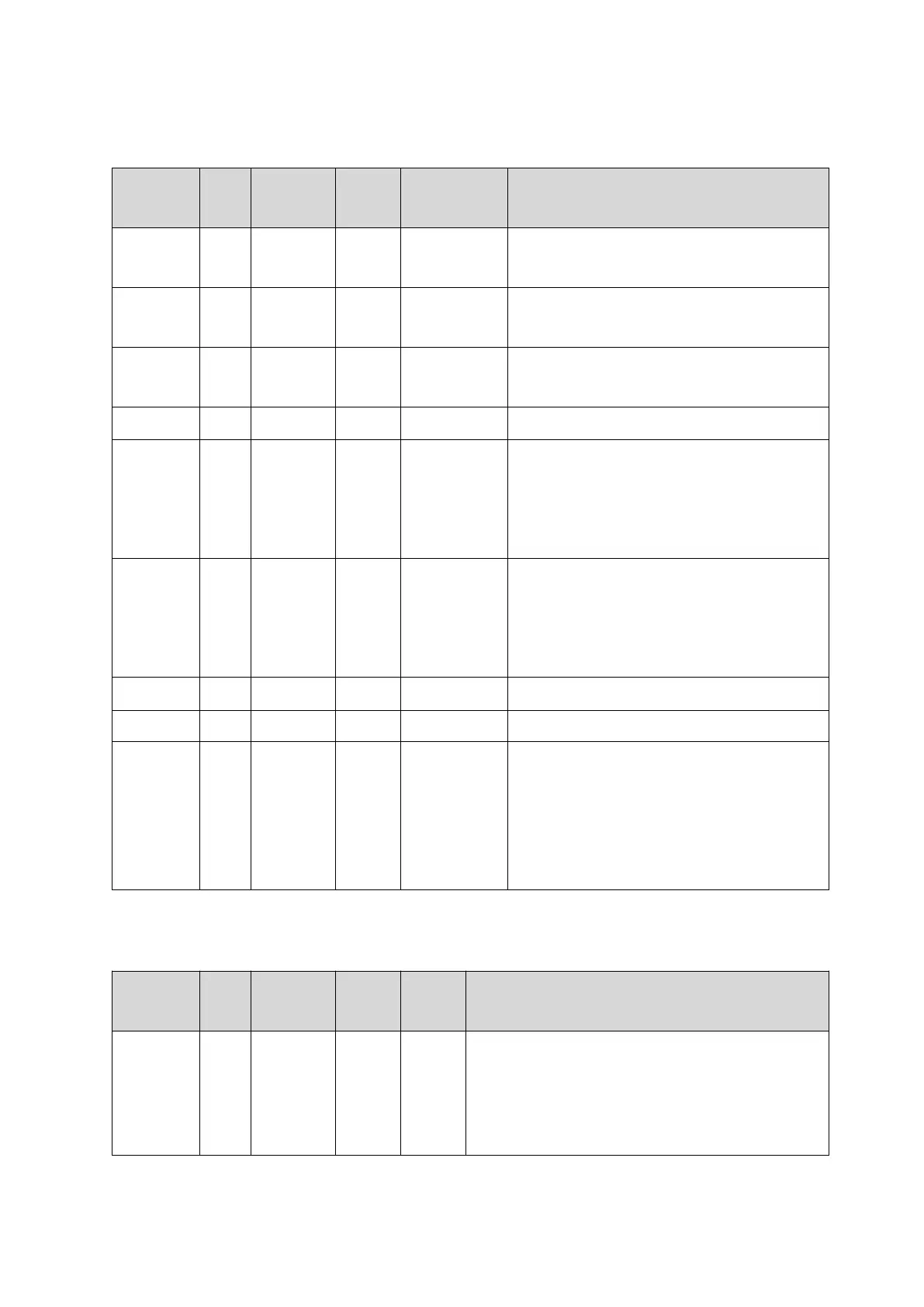
3.3.3. Motor current position and speed related registers [8~16]
Table 3-10 Register detail [8-16]
In the internal pulse mode, the current
absolute position, low 16 bits
In the internal pulse mode, the current
absolute position, high 16 bits
Current command speed.
Signed 16-bit data, unit: rpm
Current bus voltage value, unit: mV
In closed-loop mode, motor tracking error,
low 16 bits, unit: encoder resolution
Note: Closed-loop mode is only available
for EPT60.
In closed-loop mode, motor tracking error,
high 16 bits, unit: encoder resolution
Note: Closed-loop mode is only available
for EPT60.
External pulse counter, low 16 bits
External pulse counter, high 16 bits
Clear external pulse counter
0: No effect, reading always returns 0
1: It will clear the external pulse counter
and register 14 and 15 will become 0. Then
this register will become 0.
3.3.4. Driver control mode settings [17
~
23]
Table 3-11 Register details [17-23]
Command mode setting register, set the pulse
command source of the driver
0: Internal pulse command
1: External pulse command

 Loading...
Loading...
