EP Series User Manual
57
4. Modbus routines
4.1. Communication control mode
In this mode, the user can make the motor run the specified pulse stroke or jog
running by communicating the given running command. The details are as follows.
4.1.1. Point-to-point control mode
EP series drivers have the function of controlling the motor to run the specified
pulse stroke through communication. The specific modes and parameters that need to
be set are as follows:
Note:The register address is a decimal number unless it is specially marked or
explained.
(1) Set the value of register 20 to 0. Among them, register 20 indicates the preset
application program selection in internal pulse mode; P20=0 indicates
communication control, responding to the instruction of register 18.
(2) Set the functions of digital input and output ports according to application needs
and actual wiring terminals.
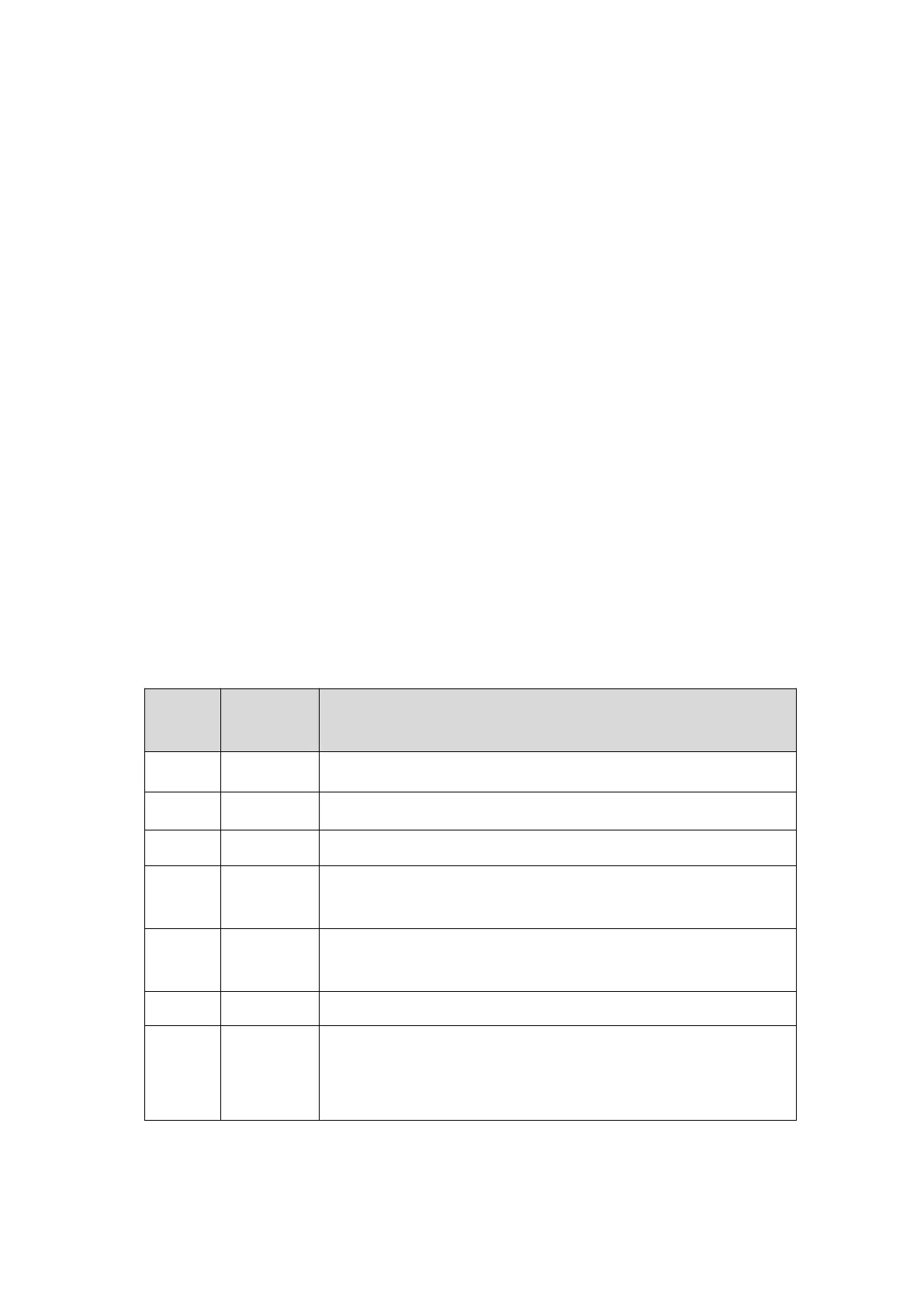
(3) Set motion parameters:
Table 4-1 Motion parameter settings in point-to-point control mode
Point-to-point motion acceleration
Point-to-point motion deceleration
Point-to-point motion maximum speed
Point-to-point motion stroke, low 16 bits
Point-to-point motion stroke, high 16 bits
Emergency stop deceleration
Set position running mode
0: Incremental
1: Absolute

 Loading...
Loading...
