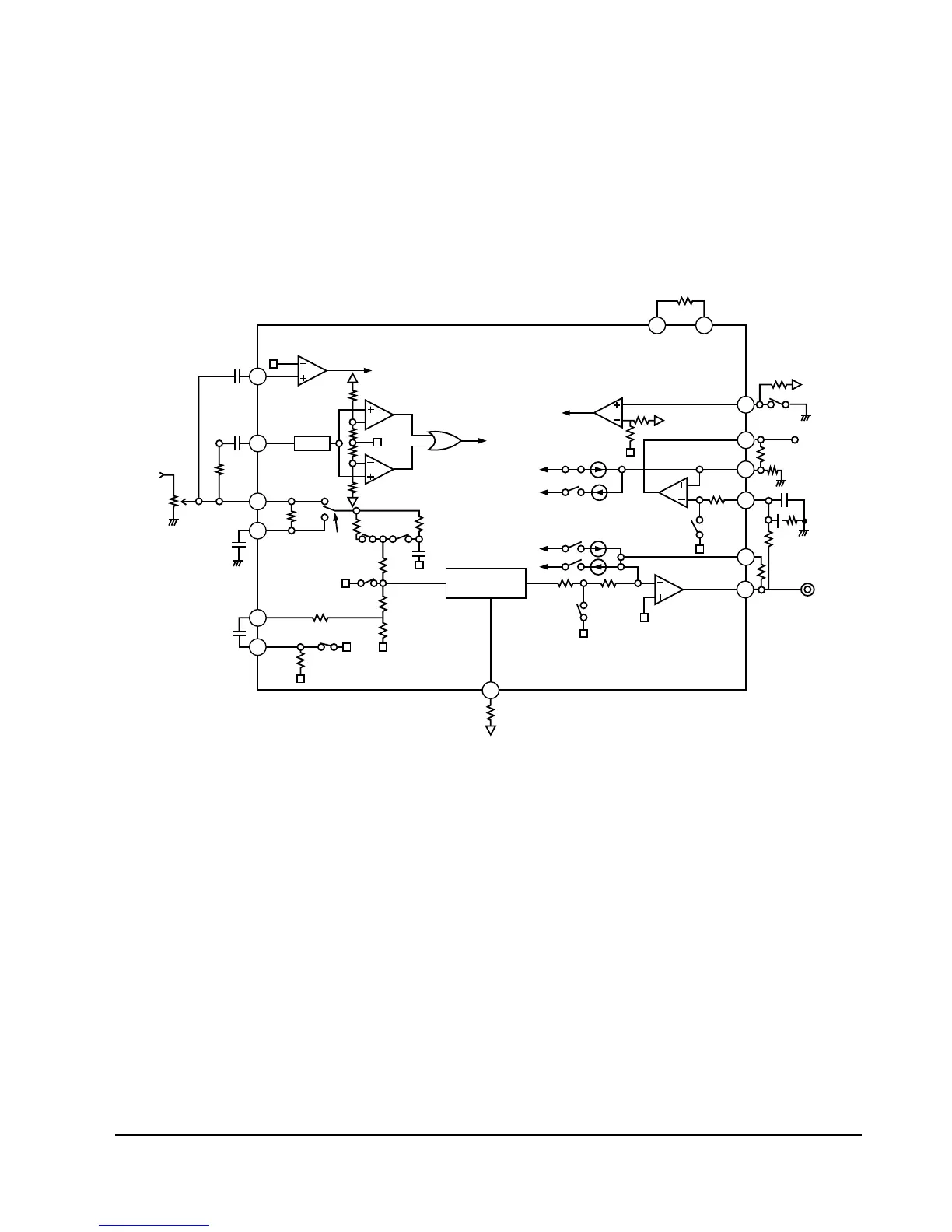
5-1-4 TRACKING SLED SERVO SYSTEM (KA9220) : NIC9220
The capacitor between pin 15 and 16 attenuates high frequencies when TG2 is off. The maximum frequency of
tracking phase compensation is inversely proportional to the resistance connected to pin 7 (about 1.2kHz at 470k).
The tracking jump (FWD and REV) is determined when TM3 and TM4 are ON, and the peak voltage induced from
the tracking coil is determined by both TM3 and TM4 currents and the feed back resistance of pin 47.
Track jump max voltage = TM3 (TM4) current x feedback resistance.
FWD or REV sled kick occurs when TM5 or TM6 is ON, and the peak voltage added to sled motor
(determined by TM5 or TM6 current and the feedback resistance of pin 41.)
Sled jump max. voltage = TM5(TM6) current x feedback resistance
Each SW current is determined by the resistance connected to pin 22 and 23.
When the resistance is about 150½,
TM3 or TM4 = 11µA,
TM5 or TM6 = 22µA,
This current is inversely proportional to the resistor, variable within a range of t 5 to 40 µA for TM3.
STOP is the ON/OFF detection signal for the limit SW (or the sled motor's innermost cirumference).