Smart Positioner
SP740 Series
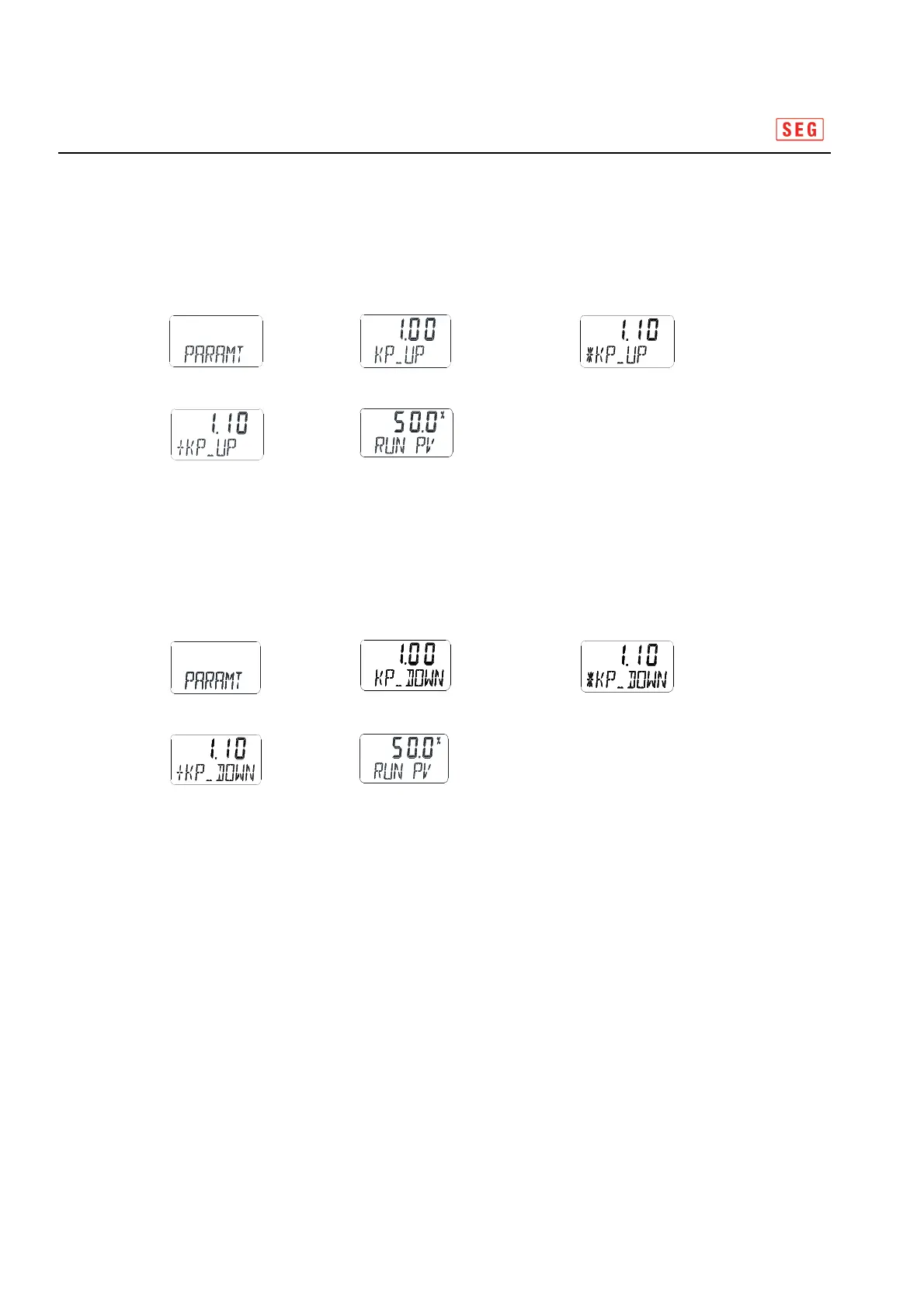
8.6.2 KP-UP ( KP_UP)
In case of upward motion within 0--> 100% , adjust operation velocity until instruction position.
It is used when driving facilities are so small or when friction load is too high , the upward velocity
is too slow.
8.6.3 KP_DOWN ( KP_DOWN )
In case of downward motion within 100--> 0% , adjust operation velocity until instruction position.
It is used when driving facilities are so small or when friction load is too high , the downward velocity
is too slow.
8.7 Hand Mode ( HAND CAL )
HAND CAL mode is executed when automatic setting position , parameter value is required
to modify after executing AUTO CAL mode .
And it is also executed when requiring to modify Zero point and End point position .
 Loading...
Loading...