135
Acceleration time constant
This parameter is the time spent for the motor from 0 rpm to the rated speed and it is defined
as “acceleration time constant”. For example, if the rated speed of the servo motor is 3000 rpm and
this parameter is set as 3000 (3s). In such case, the motor accelerating from 0 rpm to 3000 rpm
would take 3 seconds. When the speed command is set as 1000 rpm, the motor take 1 second to
accelerate from 0 rpm to 1000 rpm.
Deceleration time constant
The time spent for the motor to decelerate from the rated speed to 0 rpm is called “deceleration
time constant”. For example, if the current speed of the servo motor is 2000 rpm and this parameter is
set as 4000 (4s). In such case, the motor decelerating from 2000 rpm to 0 rpm would take 2 second.
When the running speed is 4000 rpm, the motor take 4 second to decelerate from 4000 rpm to 0 rpm.
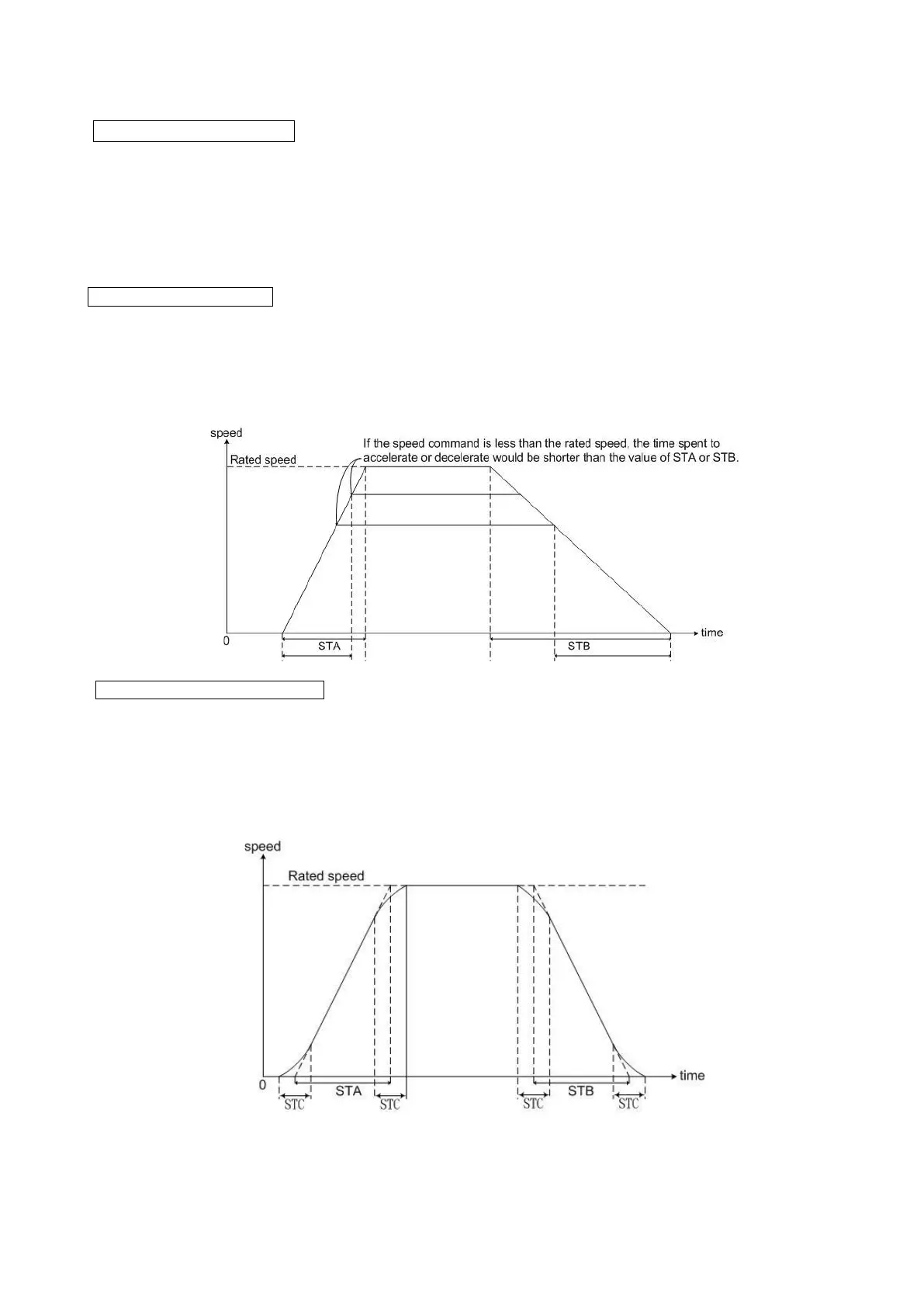
S-pattern acc./dec. time constant
The method of S-pattern acceleration/deceleration time constants is to employ a three-step curve
during the acceleration or deceleration process in order to soothe the vibration during starting or
stopping the motor. Setting an appropriate STC could improve the stability of the motor during startup
and stop. The initial S-pattern acceleration/deceleration constants are set as 0 second. Users are
recommended to enable this function when the speed control mode is performed.
Protection during acceleration/deceleration is occupied in the speed control mode.
STA, STB, STC could be set independently. Even if STC is “0”, a trapezoidal-pattern is provided.
 Loading...
Loading...