Minimum Typical Maximum
Input voltage difference Low for
Cloc
k, if SSI listener, and Data
5)
–5V – –0.2V
Input voltage
6)
–7V – 7V
Output voltage difference High for
Clock, if SSI master
7)
2V – –
Output voltage difference Low for
Cloc
k, if SSI master
7)
– – –2V
A/B incremental encoder with HTL 24V, HTL 12V, TTL (ENCx_A+, ENCx_A–, ENCx_B+,
ENCx_B–, ENC_0V)
Input frequency – – 300kHz
Pulse duration High 1.5µs – –
Pulse duration Low 1.5µs – –
Edge distance A/B (phase shift) 70° 90° 110°
Accuracy error affecting speed detec‐
t
ion
8)
Max. 5% incl. the internal resolution of the speed infor‐
mation
Accuracy error affecting position
de
tection
9)
Max. 1 increment of the internal resolution of the posi‐
tion information
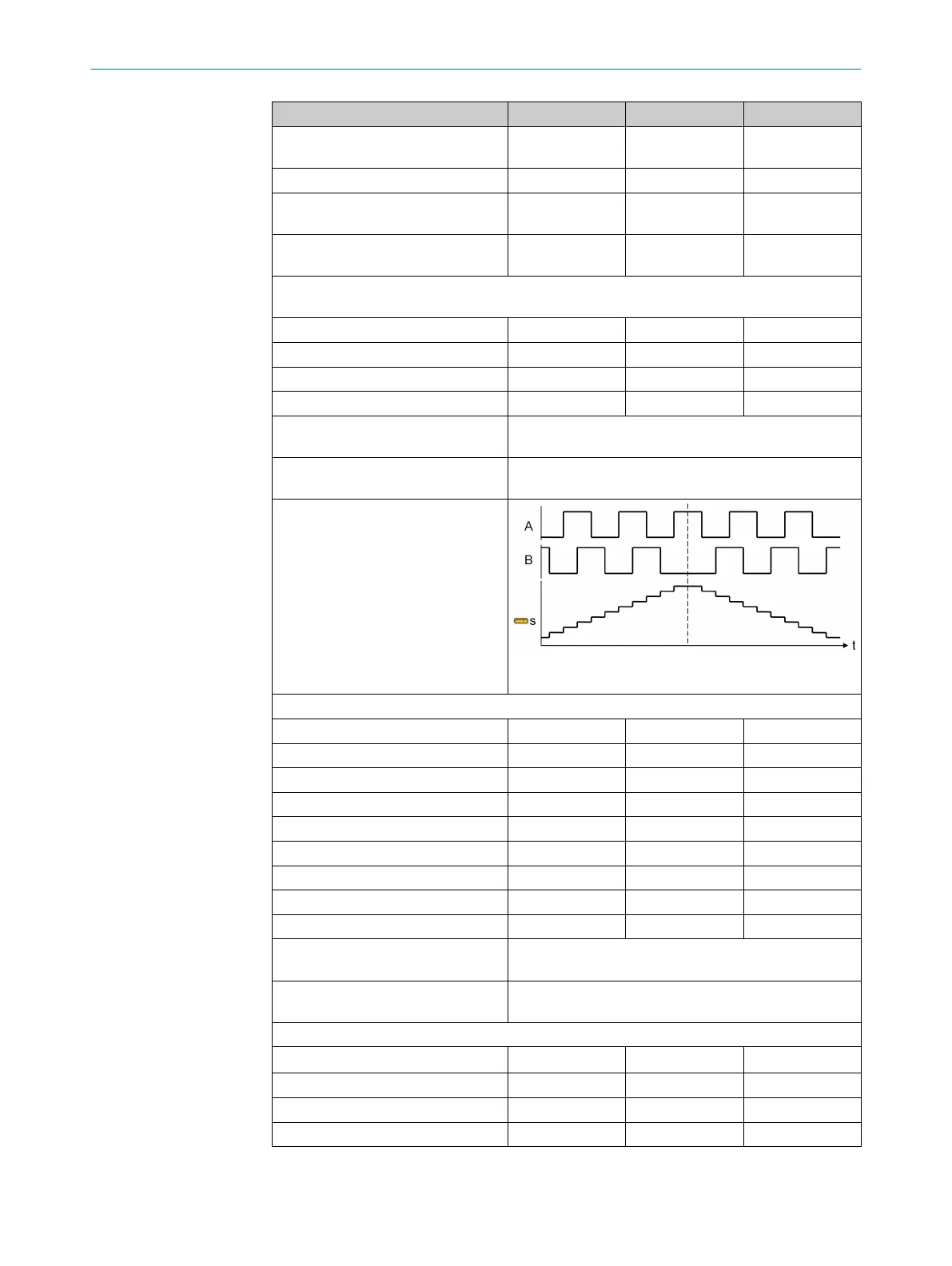
Counting direction
S = position information
A/B incremental encoder with RS-422 (ENC1_A+, ENC1_A–, ENC1_C+, ENC1_C–, ENC_0V)
Input voltage difference High
5)
0.2V – 5V
Input voltage difference Low
5)
–5V – –0.2V
Input voltage
6)
–7V – 7V
Output voltage difference High
7)
2V – –
Output voltage difference Low
7)
– – –2V
Input frequency – – 1MHz
Pulse duration High 0.4µs – –
Pulse duration Low 0.4µs – –
Edge distance A/B (phase shift) 70° 90° 110°
Accuracy error affecting speed detec‐
t
ion
8)
Max. 5% incl. the internal resolution of the speed infor‐
mation
Accuracy error affecting position
de
tection
9)
Max. 1 increment of the internal resolution of the posi‐
tion information
Sine-cosine encoder (ENCx_A+, ENCx_A–, ENCx_B+, ENCx_B–, ENC_0V)
Input voltage difference
10)
0.8V
PP
1V
PP
1.2V
PP
Input voltage
11)
0V – 5V
Input frequency 0Hz – 120kHz
Phase shift 80° 90° 100°
12 TECHNICAL DATA
162
O P E R A T I N G I N S T R U C T I O N S | Flexi Soft Modular Safety Controller 8012478/1IG6/2023-02-24 | SICK
Subject to change without notice
 Loading...
Loading...