71/80
Siemens Building Technologies Commissioning Guide CM1G5192en
HVAC Products 10 Parameterization 26.02.2003
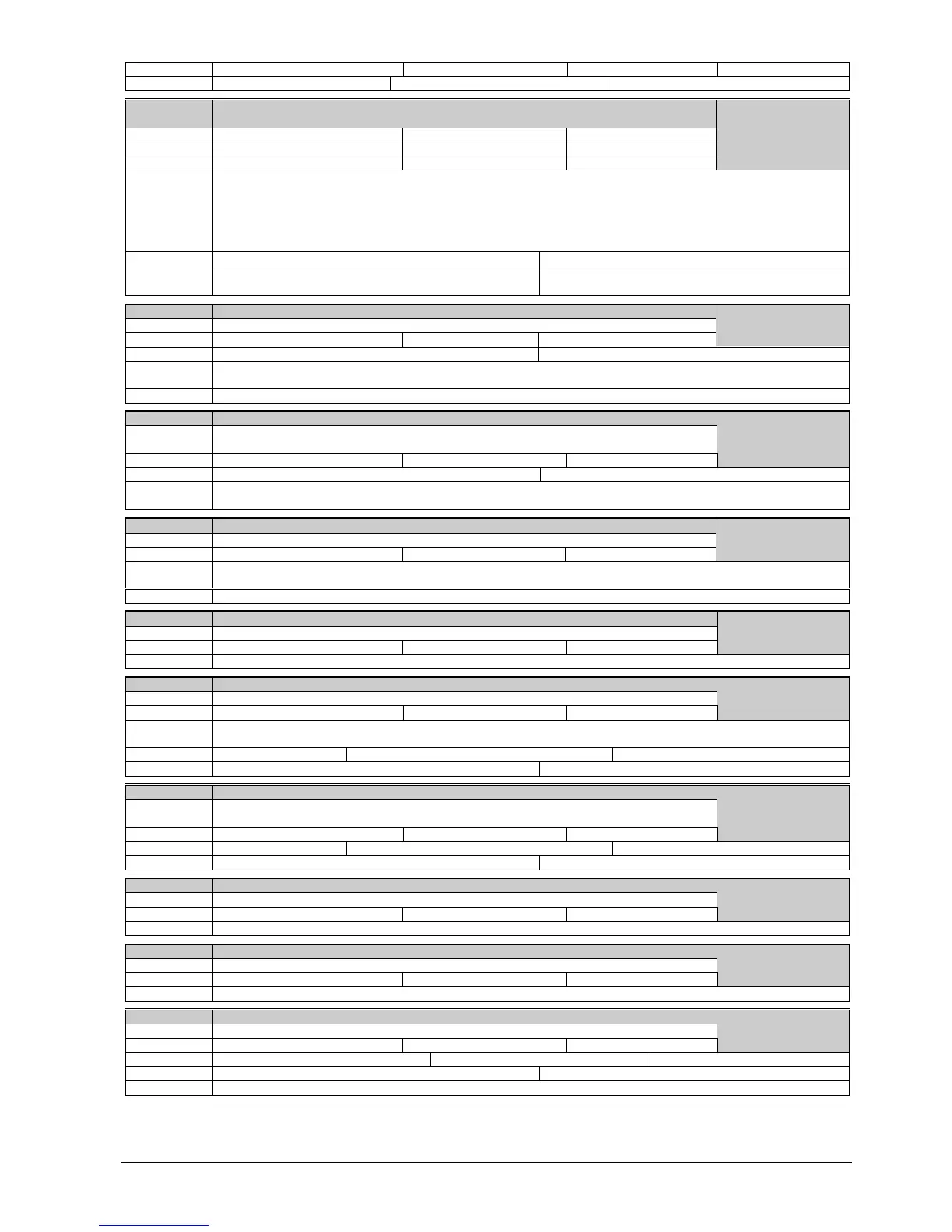
Unit: - Min: 1 Def: 1 Max: 2
Settings:
1=Direct selection 2=Direct selection + ON command 3=Binary coded selection + ON command
P2226[2]-
P2228[2]
BI: Fixed PID setpoint select Bit 4 and Bit 5
P2226[2] Min: 0:0 Def: 722:4 Max: 4000:0
P2227 Min: 1 Def: 1 Max: 2
P2228[2] Min: 0 Def: 722:5 Max: 4000:0
Level 3
Settings:
722.0=Digital input 1 (requires P0701 set to 99, BICO)
722.1=Digital input 2 (requires P0702 set to 99, BICO)
722.2=Digital input 3 (requires P0703 set to 99, BICO)
722.3=Digital input 4 (requires P0704 set to 99, BICO)
722.4=Digital input 5 (requires P0705 set to 99, BICO)
722.5=Digital input 6 (requires P0706 set to 99, BICO)
For P2226: For P2228:
Index:
P2226[0]: VSD in Auto mode
P2226[1]: VSD in Hand mode
P2228[0]: VSD in Auto mode
P2228[1]: VSD in Hand mode
P2231 Setpoint memory of PID-MOP
Setpoint memory
Unit: - Min: 0 Def: 1 Max: 1
Level 3
Settings:
0=PID-MOP setpoint will not be stored 1=PID-MOP setpoint will be stored (P2240 is updated)
Dependency:
If 0 selected, setpoint returns to value set in P2240 (setpoint of PID-MOP) after an OFF command
If 1 is selected, active setpoint is 'remembered' and P2240 updated with current value
Note:
See P2240 (setpoint of PID-MOP).
P2232 Inhibit rev. direct. of PID-MOP
Inhibits reverse setpoint selection when PID motor potentiometer is chosen either as a main
setpoint of additional setpoint (using P1000)
Unit: - Min: 0 Def: 1 Max: 1
Level 3
Settings:
0=Reserve direction is allowed 1=Reserve direction inhibited
Note:
Setting 0 enables a change of motor direction using the motor potentiometer setpoint (increase / decrease frequency
either by using digital inputs or motor potentiometer up / down buttons
P2240[2] Setpoint of PID-MOP
Setpoint of the motor potentiometer. Allows user to set a digital PID setpoint in [%]
Unit: % Min: -200.00 Def: 10.00 Max: 200.00
Level 3
Dependency:
To change the setpoint: 1. Use the up / down button on BOP or
2. Set P0702/P0703=13/14 (function of digital inputs 2 and 3)
Note:
P2240=100 % corresponds to 4000 hex
r2250 CO: Output setpoint of PID-MOP
Displays output setpoint of motor potentiometer in [%]
Unit: % Min: - Def: - Max: -
Level 3
Note:
r2250=100 % corresponds to 4000 hex
P2253[2] CI: PID setpoint
Defines setpoint source for PID setpoint input
Unit: - Min: 0:0 Def: 2250:0 Max: 4000:0
Level 2
Details:
This parameter allows the user to select the source of the PID setpoint. Normally, a digital setpoint is selected either
using a fixed PID setpoint or an active setpoint
Settings:
755=Analog input 1 2224=Fixed PI setpoint (see P2201 to P2207) 2250=Active PI setpoint (see P2240)
Index;
P2253[0]: VSD in Auto mode P2253[1]: VSD in Hand mode
P2254[2] CI: PID trim source
Selects trim source for PID setpoint. This signal is multiplied by the trim gain and added to the
PID setpoint
Unit: - Min: 0:0 Def: 0:0 Max: 4000:0
Level 3
Settings:
755=Analog input 1 2224=Fixed PI setpoint (see P2201 to P2207) 2250=Active PI setpoint (see P2240)
Index;
P2254[0]: VSD in Auto mode P2254[1]: VSD in Hand mode
P2261 PID setpoint filter time constant
Sets a time constant for smoothing the PID setpoint
Unit: s Min: 0.00 Def: 0.00 Max: 60.00
Level 3
Note:
0 = No smoothing
r2262 CO: Filtered PID setp. after RFG
Displays filtered PID setpoint after PID-RFG in [%]
Unit: % Min: - Def: - Max: -
Level 3
Note:
r2262=100 % corresponds to 4000 hex
P2264[2] CI: PID feedback
Selects the source of the PID feedback signal
Unit: - Min: 0:0 Def: 755:1 Max: 4000:0
Level 2
Settings:
755= Analog input 1 setpoint 2224 =Fixed PID setpoint 2250 =Output setpoint of PID-MOP
Index:
P2264[0]: VSD in Auto mode P2264[1]: VSD in Hand mode
Note:
When analog input is selected, offset and gain can be implemented using parameters P0756 to P0760.
 Loading...
Loading...










