Configuration
3.2 Procedure when engineering
3.2
3.2
Procedure when engineering
Motion Control
Servo drives are optimized for motion control applications. They execute linear or rotary
movements within a defined movement cycle. All movements should be optimized in terms
of time.
As a result of these considerations, servo drives must meet the following requirements:
• High dynamic response, i.e., short rise times
• Capable of overload, i.e. a high reserve for accelerating
• Wide control range, i.e. high resolution for precise positioning.
The following engineering procedure is valid for synchronous and asynchronous motors.
General procedure when engineering
The function description of the machine provides the basis when engineering. The definition
of the components is based on physical interdependencies and is usually carried-out as
follows:
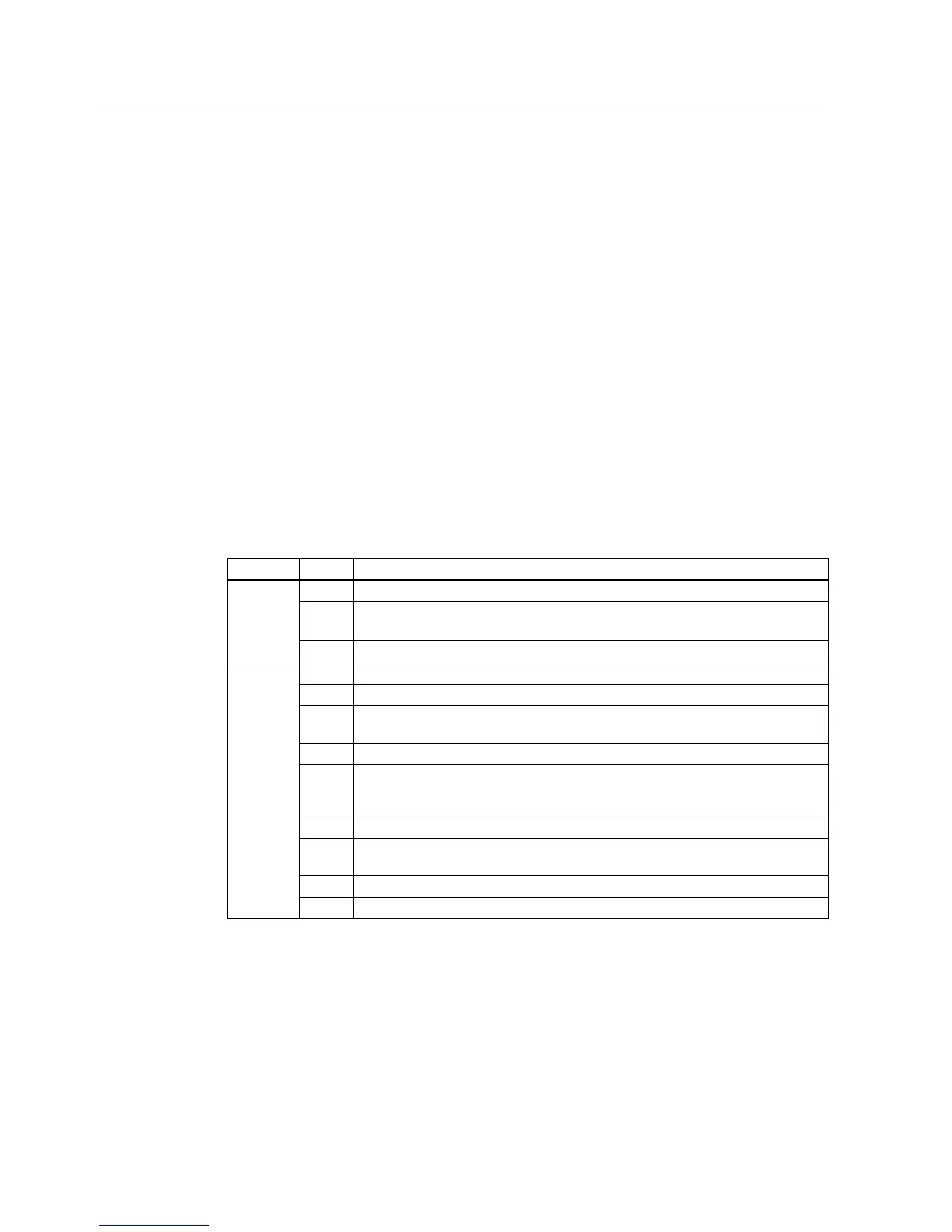
Step Description of the engineering activity
1. The type of drive/infeed type is clarified
2. Definition of supplementary conditions and integration into an automation
system
Refer to
the
following
Chapter
3. The load is defined, the max. load torque is calculated, the motor selected
4. Selecting the SIMOVERT MASTERDRIVES MC Motor Modules
5. Steps 3 and 4 are repeated for additional axes
6. Calculation of the required DC link power and definition of the SIMOVERT
MASTERDRIVES MC Line Modules
7. The line-side options (main switch, fuses, line filters, etc.) are selected
8. Specification of the required control performance and selection of the
SIMOVERT MASTERDRIVES MC Control Unit, defining and selecting the
component wiring
9. Additional system components are defined and selected
10. The current demand of the 24 V DC supply for the components is calculated
and the power supplies (SITOP devices, control supply modules) specified
11. The components for the connection system are selected
Refer to
the
converter
catalog
12. The components of the drive group are configured to form a complete drive
General Section for Synchronous Motors
3-4 Configuration Manual, (PJAL), 11.2005 Edition, 6SN1 197-0AD07-0BP4
 Loading...
Loading...









