Commissioning
5.8 Commissioning the Encoder
Control Units CU240S
Operating Instructions, 07/2008 - FW 3.2, A5E00766042B AD
105
5.8.1 Parameterizing the Encoder Interface
Encoder parameterization
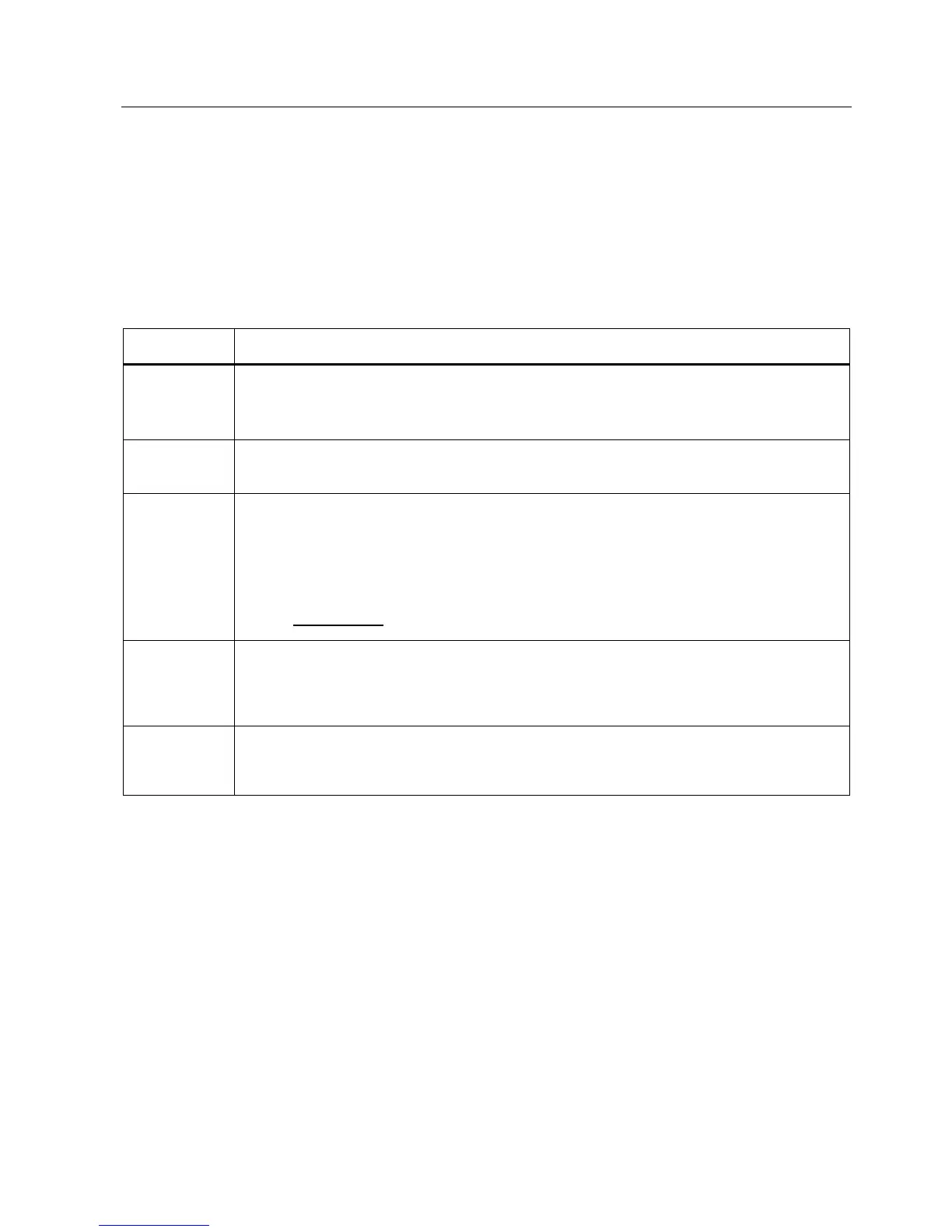
To enable the encoder to function correctly with the inverter, the parameters in the table
below, must be modified.
Table 5-13 Encoder parameters
Parameter Name
Comment
P0400[3] Encoder type
• 0: No encoder
• 2 or12: Quadrature encoder (channel A + B) –
the term "quadrature" means two periodic functions separated by a quarter cycle or 90 degrees
P0405 Encoder pulse types
Enables selection of various pulse types. Only bits 04 and 05 are used for the SINAMICS G120. See
parameter list.
P0408[3] Pulses per revolution
Specifies the number of encoder pulses per revolution. The manufacturer of the speed encoder
specifies this value. 360, 500 or 1024 are values that are generally used.
The encoder resolution (pulses per revolution p0408) which may be entered will be limited by the max.
pulse frequency of the encoder circuits (f_max = 300 kHz). The following equation calculates the
encoder frequency depending on the encoder resolution and the rotational speed (rpm). The encoder
frequency has to be less than the max. pulse frequency:
I
PD[
!I
3[8PLQ
P0410 Reverses internal direction sense
Setting P0410 =1 can be used to reverse the encoder signals instead of changing ENC_A and ENC_B
wiring.
0: Encoder Normal Rotation
1: Encoder Reverse Rotation
P0491[3] Reaction on speed signal loss
Selects reaction on loss of speed signal. Settings:
0: Trip with OFF2
1: Alarm and change to SLVC
 Loading...
Loading...







