3 Operation
3.3 Configuring Mode (Parameterization and Configuring Mode)
3.3.2 Parameterization Mode AdAP (Adaptation)
Manual
144
SIP ART DR24 6DR2410
C79000-G7476-C153-03
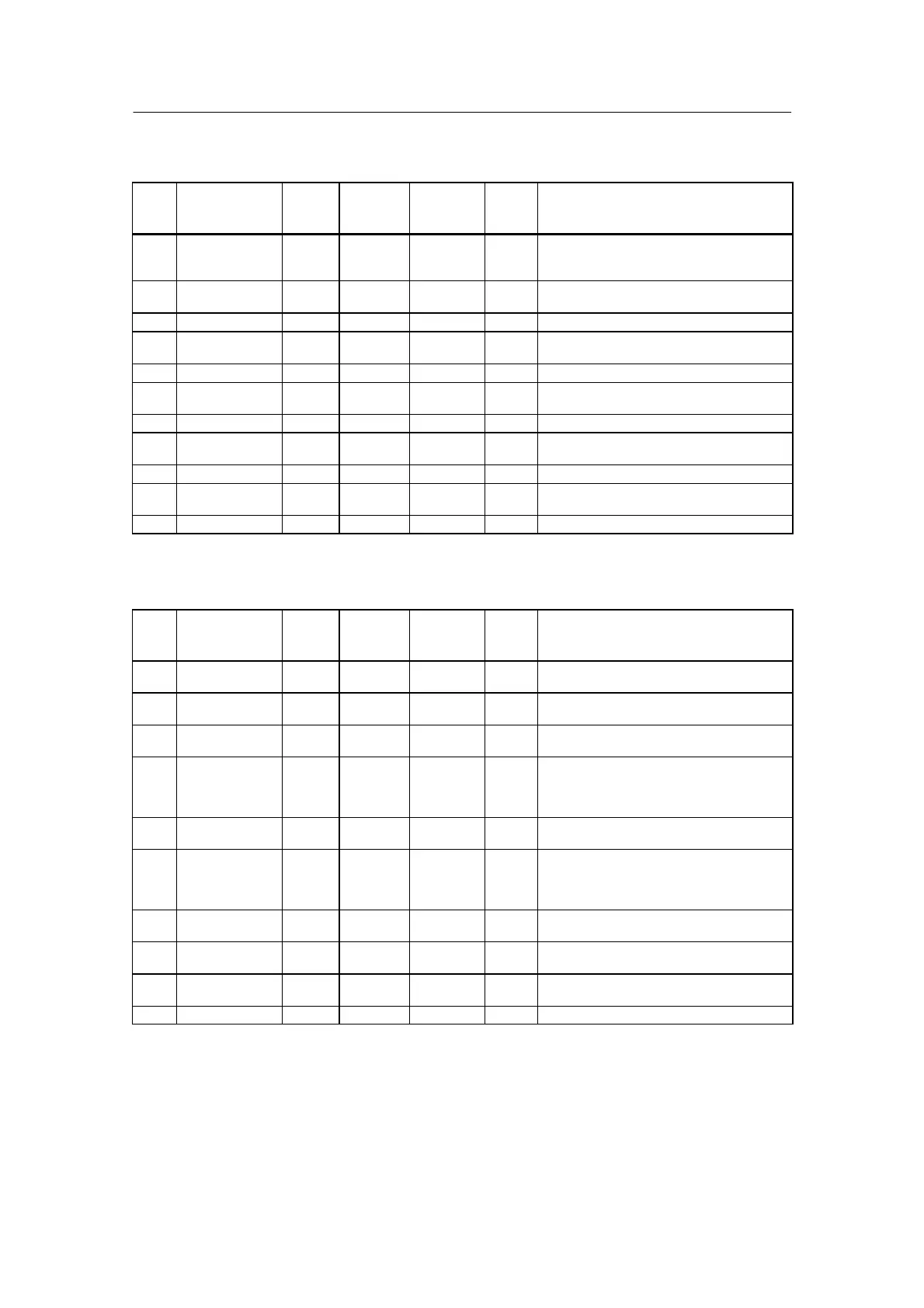
Pre adaptation
dd3
dd1
Setting/
display range
dd2
Factory
setting
Resolu-
tion
Dime n-
sion
Parameter meaning/Comments
tU
dPv
dY
oFF
*)
, 0.1 - 24.0
nEG, PoS
0.5 - 90.0
Control-
led vari-
able x
oFF
PoS
0.5
0.1
--
0.1
h
--
%
Monitoring period Preset.
Direction of step for the
Amplitude of step adaptation
vv.o 0.100 - 10.00
1)
Pi or
Pid
5.000 128 values
per octave
1
previous derivative action at: Tv = oFF
Tv ≠ oFF
vv.n Strt
1)
AdAP -- -- -- Start of adaptation
cP.o 0.100 -- 100.0
1)
Pi or
Pid
0.100 128 values
per octave
1
previous proportional gain at : Tv = oFF
Tv ≠ oFF
cP.n Strt
1)
AdAP -- -- -- Start of adaptation
tn.o 1.000 - 9984
1)
Pi or
Pid
9984 128 values
per octave
s
previous integral reset at: Tv = oFF
Tv ≠ oFF
tn.n Strt 1) AdAP -- -- -- Start of adaptation
tv.o oFF
1)
1.000 - 2992
1)
Pi or
Pid
oFF 128 values
per octave
s
previous derivative action time at: Tv = oFF
tv.n Strt
1)
AdAP -- -- -- Start of adaptation
AH.o 0.0 - 10.0
1)
Pi or
Pid
0.0 0.1 0.1 previous response threshold
AH.n Strt
1)
AdAP -- -- -- Start of adaptation
1)
not adjustable *) at Tu = oFF the monitoring period is 24 hrs
Post adaptation
dd3
dd1
Setting/
display range
dd2
Factory
setting
Resolu-
tion
Dime n-
sion
Parameter meaning/Comments
vv.o 0.100 -- 10.00 Pi or
Pid
5.000 128 values
per octave
1 previous derivative action gain at: Tv = oFF
Tv ≠ oFF
vv.n 5.000
0.100 -- 10.00
Pid.*
)
-- 128 values
per octave
1 new derivative action gain for PID-
controller
cP.o 0.100 -- 100.0 Pi or
Pid
0.100 128 values
per octave
1 previous proportional gain at: Tv = oFF
Tv ≠ oFF
cP.n
1)
cP.n
0.100 -- 100.0
0.100 - 100.0
Pi.*
)
Pid.*
)
--
--
128 values
per octave
1
1
new proportional gain for PI
controller
PID
controller
tn.o 1.000 - 9984 Pi or
Pid
9984 128 values
per octave
s previous integral reset time at: Tv = oFF
Tv ≠ oFF
tn.n
tn.n
1.000 - 9984
1.000 - 9984
Pi.*
)
Pid.*
)
--
--
128 values
per octave
s new integral reset time for PI
controller
PID
controller
tv.o oFF
1.000 -- 2992
Pi or
Pid
oFF 128 values
per octave
s previous derivative action time at: Tv = oFF
Tv ≠ oFF
tv.n 1.000 -- 2992 Pid.*
)
-- 128 values
per octave
s new derivative action time for PID-
controller
AH.o 0.0 -- 10.0 Pi or
Pid
0.0 0.1 % previous response threshold
AH.n 0.0 -- 10.0 Pid -- 0.1 % new response threshold
1)
step in at cPn after adaptation *) control loop order 1 to 8
Table 3-3 Adaptation parameter list in parameterization mode AdAP
 Loading...
Loading...









