Manual
1 Technical Description
1.5 Functional Description
1.5.8 Complex Functions (Arithmetic blocks c, d, h)
SIP ART DR24 6DR2410
C79000-G7476-C153-03
75
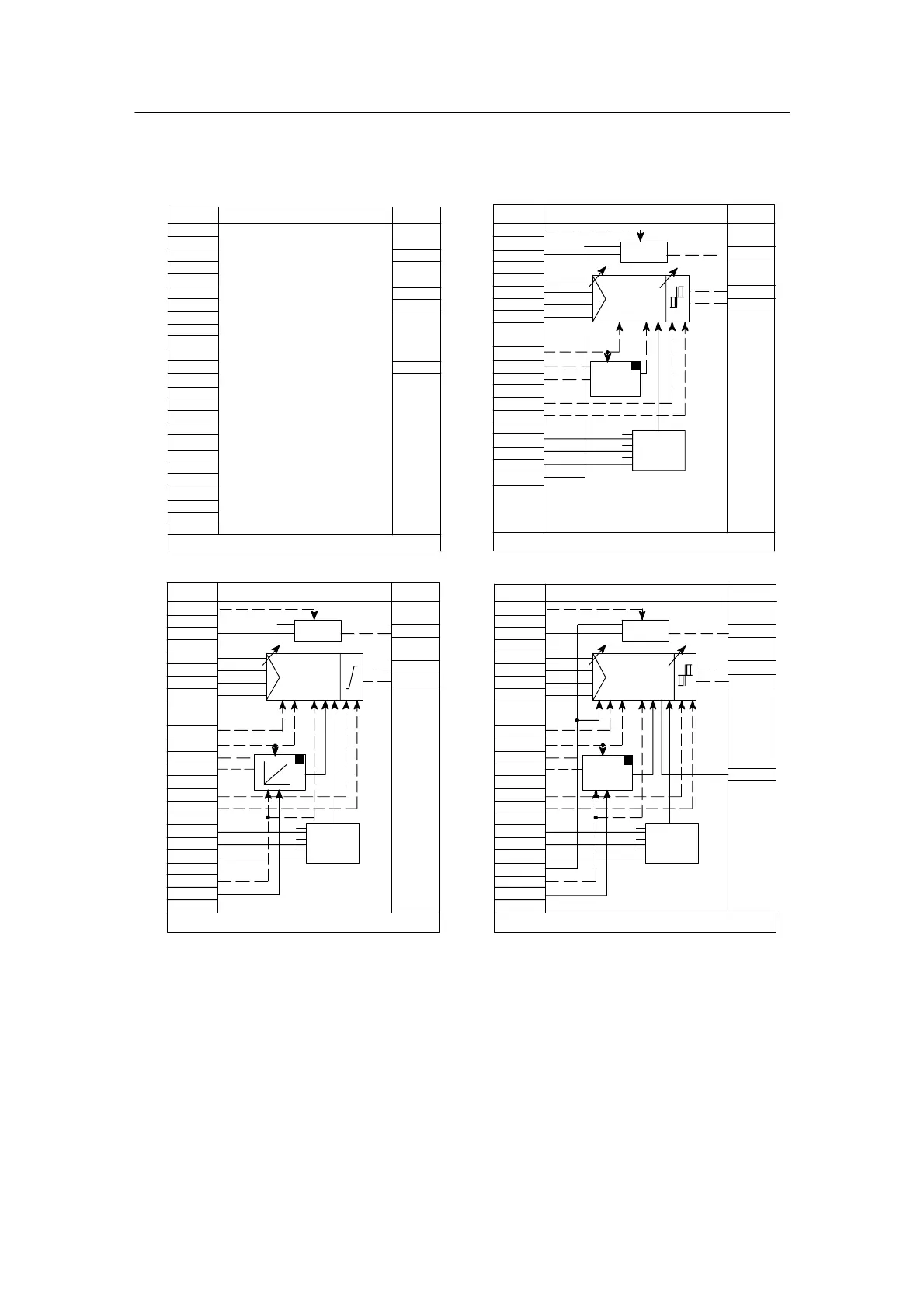
1.5.8.4 Arithmetic Blocks h01.F to h04.F
No. in the cycle
# .01
∩ .02
∩ .03
∩ .04
∩ .05
∩ .06
# .08
# .09
# .10
# .11
# .12
∩ .13
∩ .14
∩ .15
∩ .16
+Δy
-Δy
Name of the arithmetic block
No. in the cycle
Private parameters
h0_.F
# .01
∩ .02
∩ .03
∩ .04
∩ .05
∩ .06
# .07
# .08
# .09
# .10
# .11
# .12
∩ .13
∩ .14
∩ .15
# .16
.17
∩ .18
.1A
.2A
.3A
.4A
CSi1,CSi2,CSi3,CSi4
Consecutive number of the
arithmetic block
cP,tn,tv,vv,AH,tY,tA,tE
h0_.F
.1A#
.2A#
.3A
Av
Adaptation
Yz
XdP
XdD
xdI
S-controller
internal
kp,Tn,Tv,AH
tY, tA, tE
x
YR
H
+Δy
-Δy
>100 %
<0 %
AL
Parameter
control
+yBL
--y BL
SG1
SG2
SG3
YR
cP
tn
tV
(onPA)
(onPA)
S controller internal feedback (controller step internal)
Lo
0.000
0.000
ncon
0.000
0.000
Lo
Lo
Lo
Lo
Lo
1.000
1.000
1.000
0.000
n
---
n
---
Consecutive number of the
arithmetic block
Ccn1,Ccn2,Ccn3,Ccn4
h0_.F
+Δy
-Δy
xdS
cP
tn
tV
# .01
∩ .02
∩ .03
∩ .04
∩ .05
∩ .06
# .07
# .08
# .09
# .10
# .11
# .12
∩ .13
∩ .14
∩ .15
# .16
∩ .17
cP,tn,tv,vv,AH,Yo,YA,YE,tY
.1A#
.2A∩
.3A∩
Av
Adaptation
Yz
XdP
XdD
xdI
K-controller
kp,Tn,Tv,AH,YA,YE
x
Y
P
H
+Δy
-Δy
AL
+yBL
--y BL
SG1
SG2
SG3
(onPA)
K--controller (controller continuous)
Lo
0.000
0.000
ncon
0.000
0.000
Lo
Lo
Lo
Lo
Lo
Lo
1.000
1.000
1.000
Lo
0.000
Ya
Y
tY
N
Parameter
control
N
Yn
cP
tn
tV
#.01
∩ .02
∩ .03
∩ 04
∩ .05
∩ .06
#.07
#.08
#.09
#.10
#.11
#.12
∩ .13
∩ .14
∩ .15
∩ .16
#.17
∩ .18
CSEI,CSE2,CSE3,CSE4
cP,tn,tv,vv,AH,Yo,YA,YE,tA,tE
h0_.F
.1A#
.2A#
.3A#
Av
Adaptation
Yz
XdP
XdD
xdI
x
P
H
+Δy
-Δy
AL
+yBL
--y BL
SG1
SG2
SG3
(onPA)
S--controller external feedback (controller step external)
Lo
0.000
0.000
ncon
0.000
0.000
Lo
Lo
Lo
Lo
Lo
Lo
1.000
1.000
1.000
ncon
Lo
0.000
N
Parameter
control
Y
R
N
Yn
>100 %
<0 %
S-controller
internal
kp,Tn,Tv,AH
tY, tA, tE
.4A∩
∩ = analog
# = binary
n
---
n
---
In the arithmetic blocks h*.F a total of 4 controller blocks can be defined in FdeF, optionally
K-controller 1 (Ccn1) or S-controller int 1 (CSi1) or S-controller ext 1 (CSE1) and
K-controller 2 (Ccn2) or S-controller int 2 (CSi2) or S-controller ext 2 (CSE2) and
K-controller 3 (Ccn3) or S-controller int 3 (CSi3) or S-controller ext 3 (CSE3) and
K-controller 4 (Ccn4) or S-controller int 4 (CSi4) or S-controller ext 4 (CSE4)
S-controller int = S-controller with internal position feedback
S-controller ext = S-controller with external position feedback
Figure 1--35 Arithmetic blocks h, controller

 Loading...
Loading...








