1 Technical Description
1.5 Functional Description
1.5.8 Complex Functions (Arithmetic blocks c, d, h)
Manual
90
SIP ART DR24 6DR2410
C79000-G7476-C153-03
- Repeat the setting according to the previous two steps until the oscillations cannot be
eliminated again.
- Reduce Tv and Kp slightly until the oscillations stop.
- Reduce Tn until the control loop tends to oscillate again.
- Increase Tn slightly until the tendency to oscillate disappears.
D Manual setting of the control parameters after the transient function
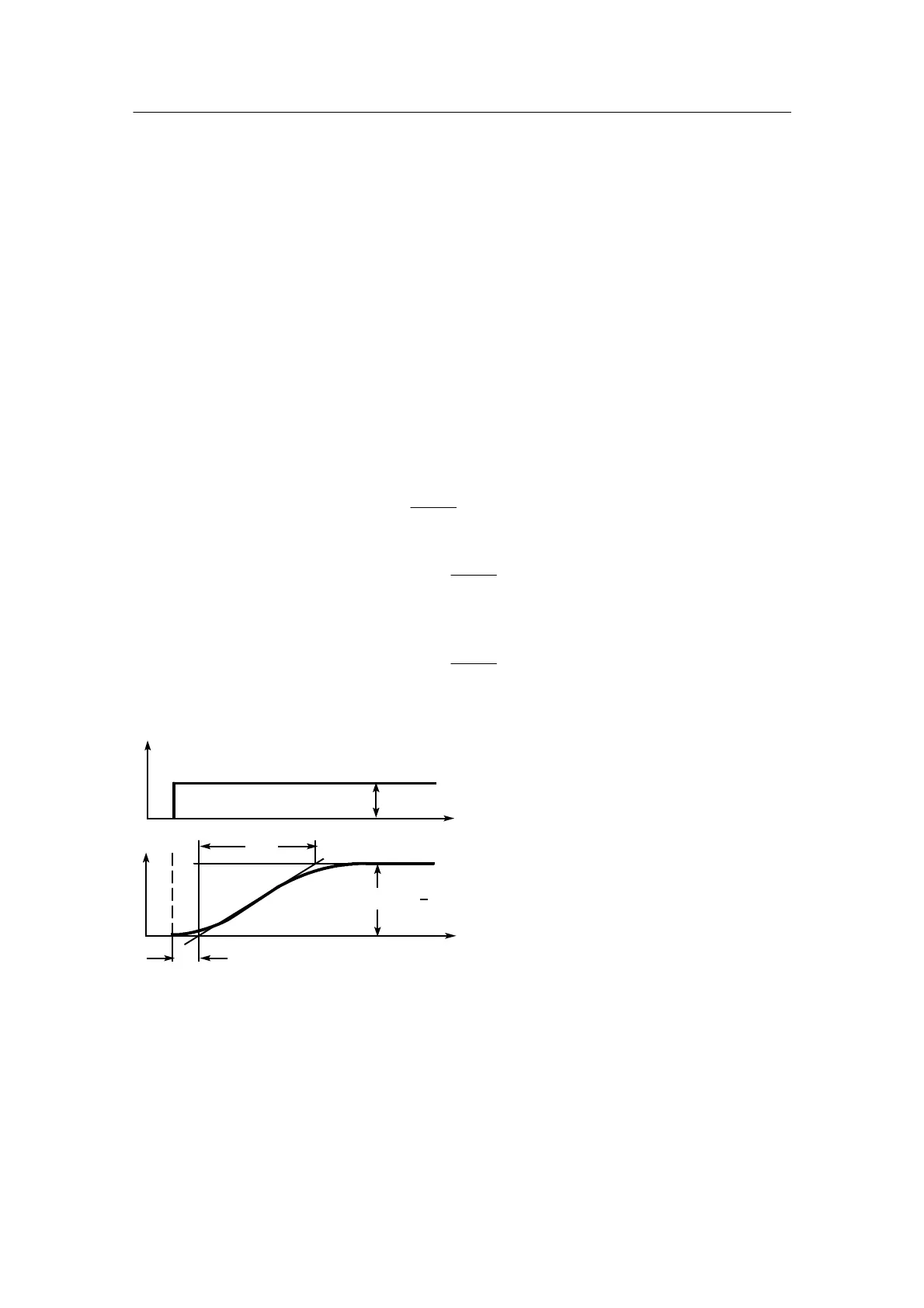
If the transient function of the controlled system is known or can be determined, the control
parameters can be set according to the setting guidelines specified in the literature. The
transient function can be recorded in the “Manual mode” position of the controller by a sud-
den change in the manipulated variable and the course of the controlled variable registered
with a recorder. This will give a transient function similar to that shown in figure 1--41.
Good average values from the setting data of several authors give the following rules of
thumb:
- P--controller
Proportional action factor Kp ≈
Tg
Tu· Ks
- Pi-controller
Proportional action factor Kp ≈ 0, 8 ·
Tg
Tu· Ks
Integral action time Tn ≈ 3·Tu
- PiD controller
Proportional action factor Kp ≈ 1, 2 ·
Tg
Tu· Ks
Integral action time Tn ≈ Tu
Derivat ivel action time Tv ≈ 0, 4 · Tu
y Manipulated variable
w Command variable
x Controlled variable
tTime
Tu Delay time
Tg Compensation time
Ks Transmission factor of the
controlled system
y
y
t
x
Tu
t
Tg
x Ks=
x
y
Figure 1--41 Transient function of a controlled system with compensation
 Loading...
Loading...









