ST10 firmware UM0289
20/29
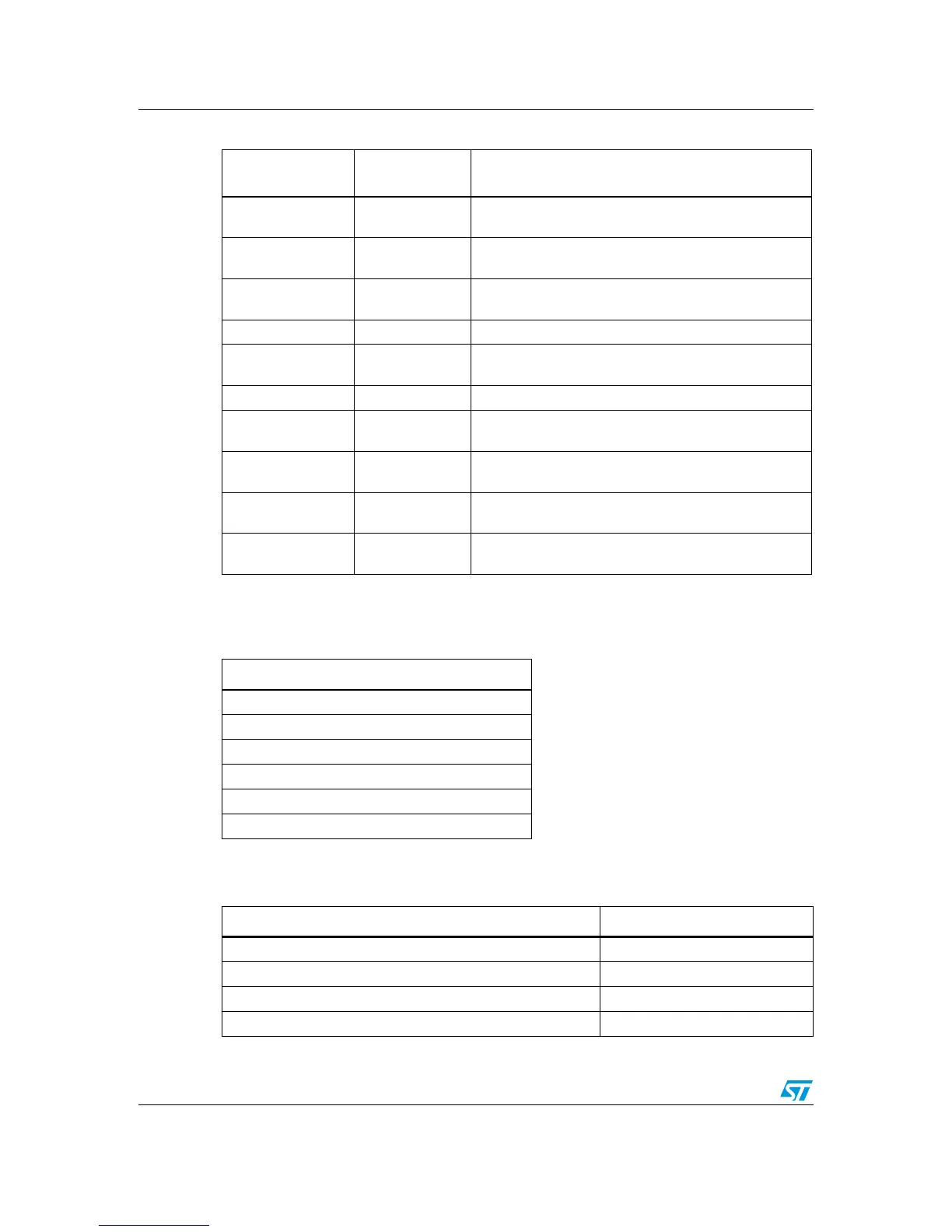
Table 8. Send_Parameters contents
"Send latest error" (0x41) is a particular frame in which the payload is formed by a text string
indicating the last error occurred, typical values are shown below.
Table 9. Error strings
A series of protocol frames, used for communication, are provided in Ta bl e 1 0 .
Table 10. Frame examples
Payload
byte order
Field Description
1 Motor Connector
1 Byte indicating which powerSPIN board is connected to
a specific connector.
2-3 Encoder
2 Bytes indicating the number of pulses for revolution of
motor encoder.
4PWM %
Byte indicating the duty cycle value of PWM (range: 0-
100)
5 PWM Freq. Byte indicating the frequency PWM (range: 17-30)
6 Time control loop
Byte indicating the control loop time (number of 200us
steps to be added to the basic control loop of 1ms).
7 Status Byte indicating if the control is enabled (0 or 1)
8-9 Speed
2 Bytes indicating the reference speed of motor (range 1-
3000 rpm)
10-11 P
2 Bytes indicating the proportional gain of the speed
control (range 1-1000, with a firmware scaling)
12-13 I
2 Bytes indicating the integral gain of the speed control
(range 1-1000, with a firmware scaling)
14-15 D
2 Bytes indicating the derivative gain of the speed control
(range 1-1000, with a firmware scaling)
String Types
No error
CRC not valid
Command not valid
Command not executable
Motor error
Value out of range
Frame Description Value (Hex)
Connect 00-00-00
Enable 6235 driver on powerSPIN connector 1 01-01-1A-1C
Brake 6205 driver on powerSPIN connector 3 03-01-3B-3F
ACK for a Forward command 80-01-05-86