Hardware Version : 5.02 Document Version : 1.0.
TECHMAN ROBOT INC. 5F., No. 58-2, Huaya 2nd Rd., Guishan Dist., Taoyuan City, 333411 , Taiwan
13
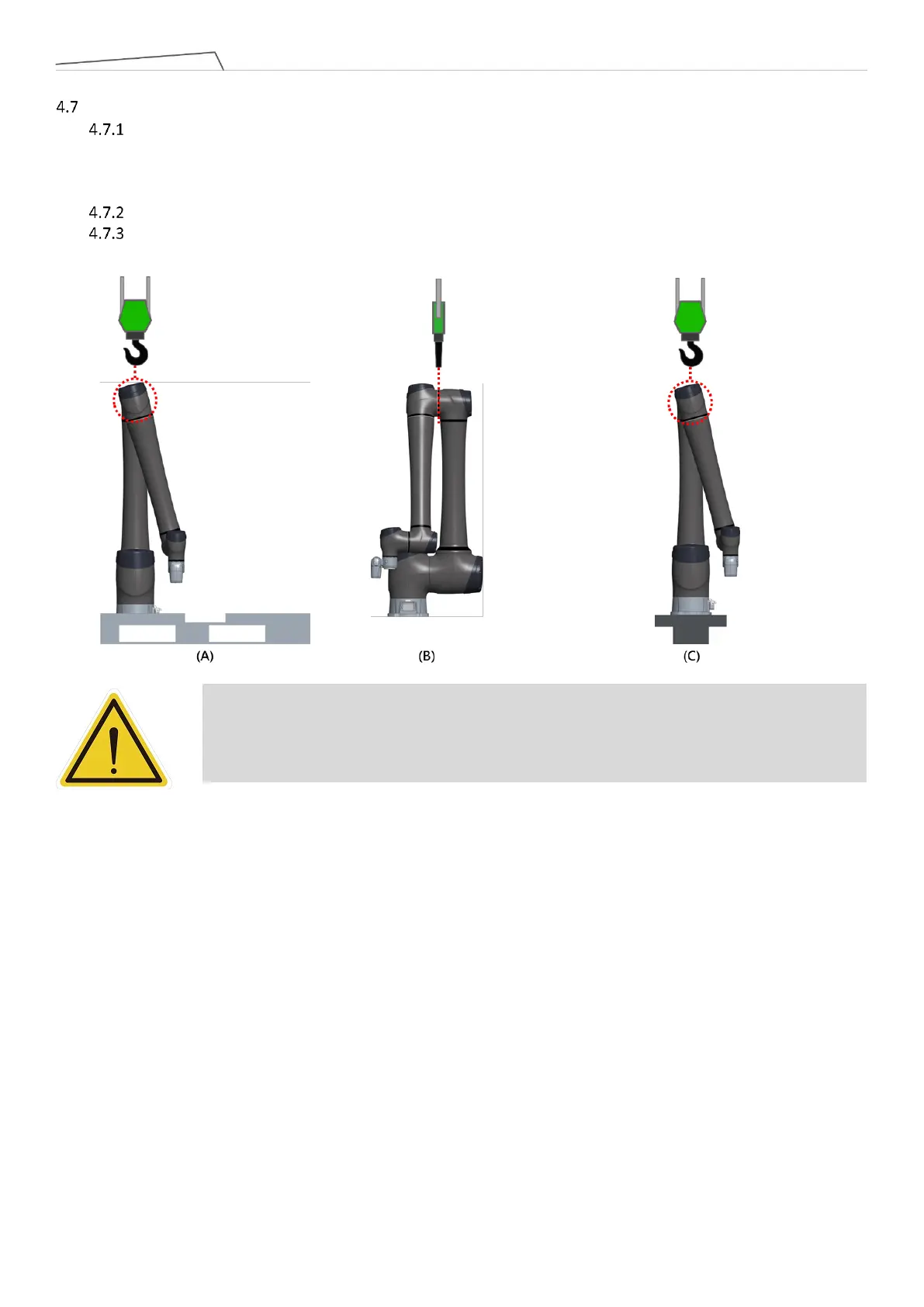
Lifting Method:
Refer to diagram (A), tie the lifting rope between Joint 3 and Joint 4, then attach the lifting hook. Adjust
the lifting hook to a slightly tight position to prevent the robot from tilting when the base screws are loosened.
Once the rope and lifting hook are properly installed, remove the fixed screws between the Base and the
platform.
Refer to diagram (B), lift the robot off the pallet and move it to the designated installation location.
Refer to diagram (C), move to the installation location, align the robot, and use M12 screws and washers to
secure the robot to the fixed surface of the base.
CAUTION:
When performing lifting operations, adhere to the recommended arm lifting posture and
method to avoid risks to the machine and personnel during operation.