3
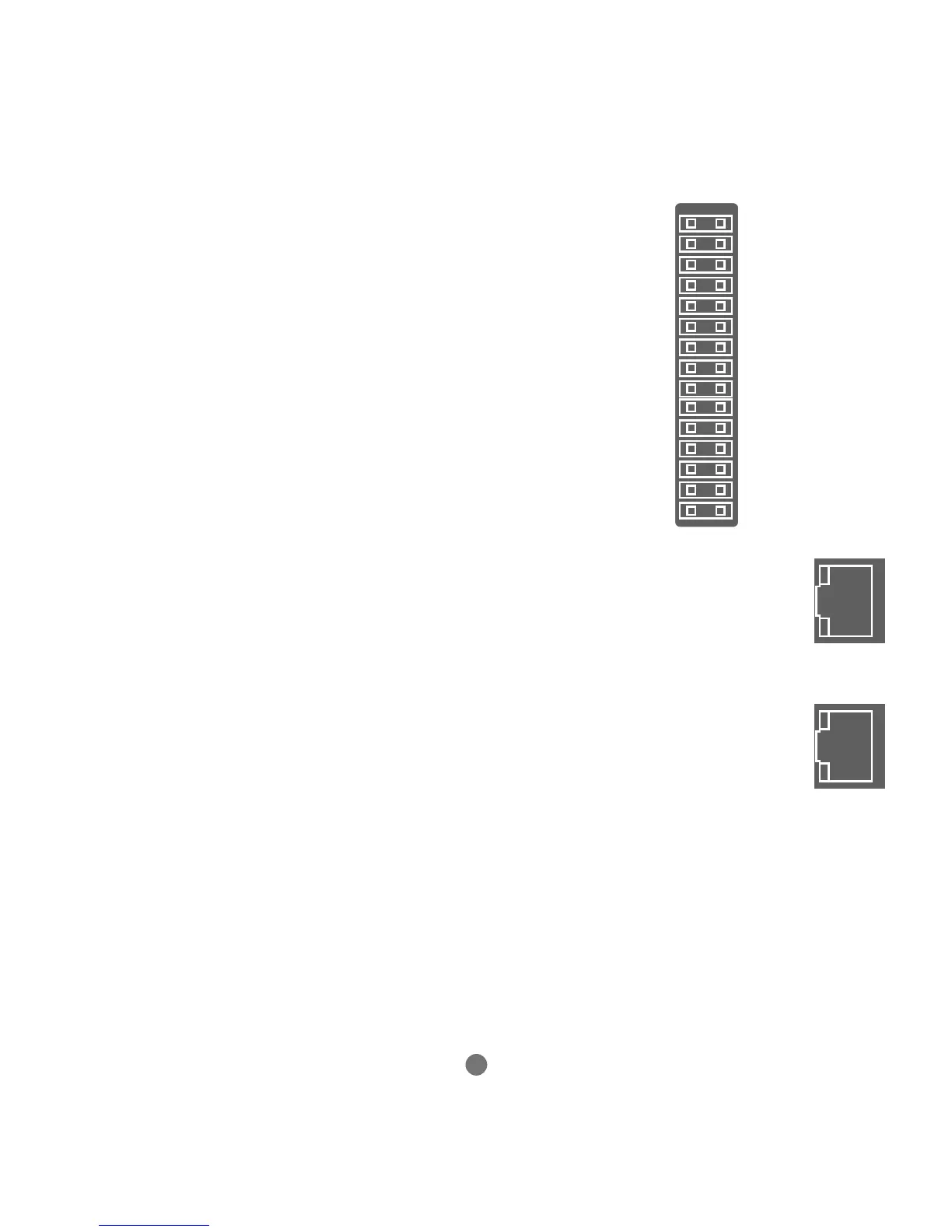
I/O CONNECTOR
The bottom 2 pins of the 30 way high density input connector are used to
provide the 24V dc power to the MC664. A 24V dc, Class 2 transformer or
power source must be provided.
The 2 pins above the 24V dc supply are to power the I/O 24 Volts.
THE MC664 IS GROUNDED VIA THE METAL CHASSIS. IT MUST BE
IN
ST
ALLED O
N A
N UNPAINTED M
E
TAL PLATE O
R
DIN RAIL W
H
I
CH IS
C
O
NNECTE
D T
O E
ARTH.
THE MC464 I/O CONNECTOR DOES NOT FIT INTO THE MC664 /
MC664-
X MOT
I
ON
C
O
O
R
DINATER.
RJ45 ETHERNET CONNECTOR (TOP)
A standard Ethernet connector is provided for use as the primary programming interface.
The Trio programming software, Motion Perfect 4 and above, must be installed on a Windows based PC that is
tted with an Ethernet connection. The IP address is displayed on the MC664 display for a few seconds after
power-up or when an Ethernet cable is plugged in.
RJ45 ETHERCAT CONNECTOR (BOTTOM)
EtherCAT master port for connection to Servo/Stepper drives and I/O devices via EtherCAT industry standard
protocols.
Recommended screened cable for EtherCAT; Cat5 SF/UTP.
0V AIN
AIN0
AIN1
WDOG+
WDOG-
I 0
I 1
I 2
I 3
I 4
I 5
I 6
I 7
0V I/O
0V SUPPLY
0V CA N/AIN
CAN LOW
CAN EARTH
CAN HIGH
24V CAN/AIN SUPPLY
I/O8
I/O9
I/O10
I/O11
I/O12
I/O13
I/O14
I/O15
24V I/O SUPPLY
24V SUPPLY