MAX-M10M-Integration manual
3.6.2.3 Cyclic tracking
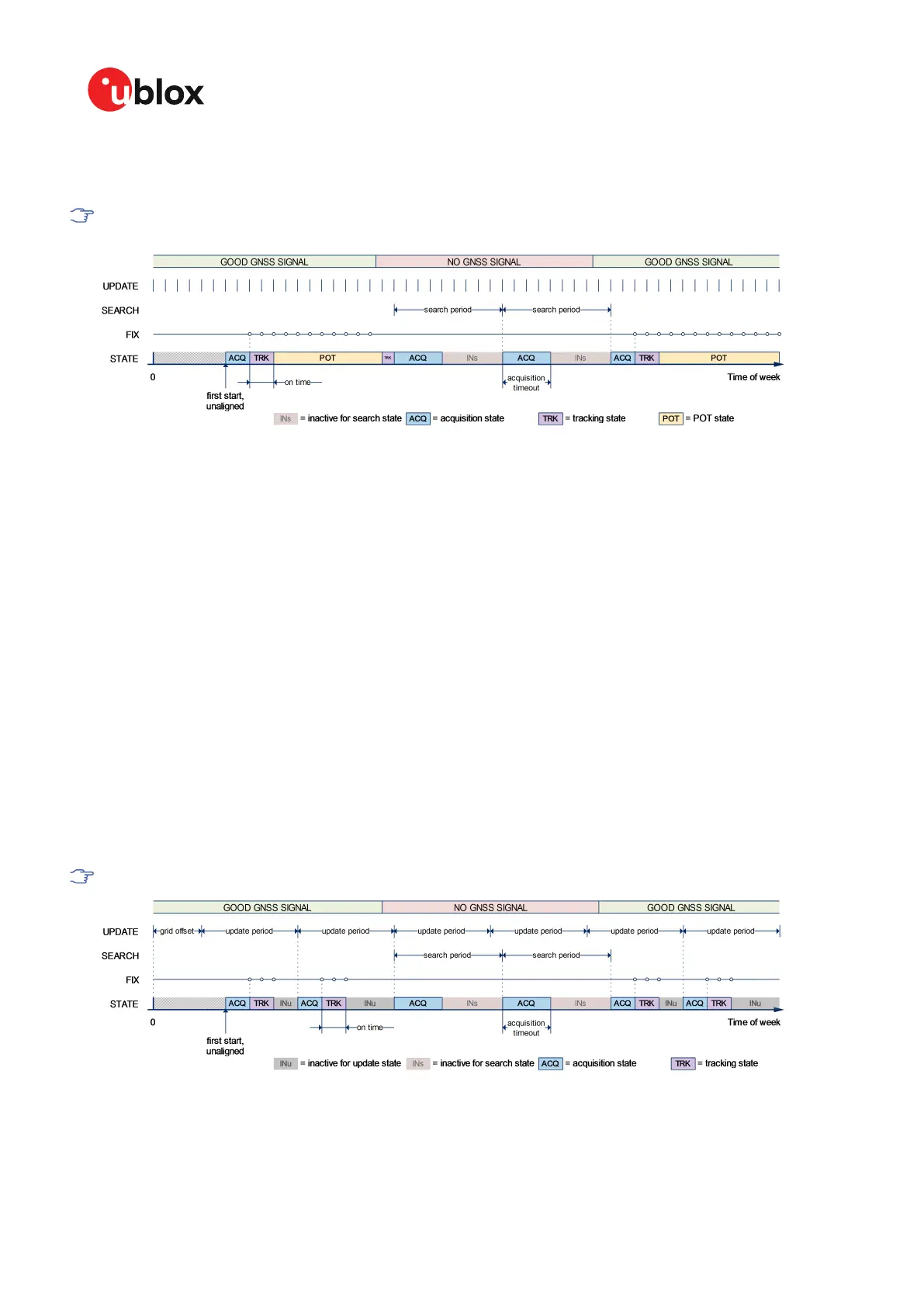
Power save mode cyclic tracking (PSMCT) operation is described in Figure 13.
PSMCT supports 1 Hz and 2 Hz navigation update rates. In addition, longer update periods from
2 s to 10 s are supported at 1 s steps.
Figure 13: Cyclic tracking operation
• When the receiver is switched on, it first enters the "Acquisition" state. A larger number of
signals tracked later helps the receiver to remain in the "POT" state if some signals get blocked
and are lost. This may reduce the overall power consumption.
• If the receiver is able to acquire a valid position fix (one passing the navigation output filters)
within the time given by the Acquisition timeout, it switches to the "Tracking" state and the
ONTIME starts. Otherwise it enters the "Inactive for search" state and restarts after the
configured search period (minus a start-up margin).
• Once the ONTIME is over, the "POT" state is entered. Setting the ONTIME to zero causes the
receiver to enter the "POT" state as soon as possible.
• In the "POT" state the receiver continues to output position fixes according to the CFG-RATE-*.
• If the signal becomes weak or is lost during the "POT" state, the "Tracking" state is entered.
• Once the signal is good again and the newly started ONTIME is over, the receiver will re-enter
the "POT" state.
• If the receiver cannot get a position fix in the "Tracking" state, it enters the "Acquisition"
state. Should the acquisition fail as well, the "Inactive for search" state is entered. If
DONOTENTEROFF is enabled and no fix is possible, the receiver will remain in the "Acquisition"
state until a fix is possible and it will never enter the "Inactive for search" state.
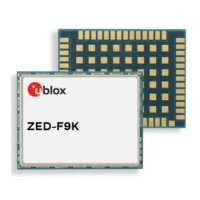
3.6.2.4 On/Off mode
Power save mode on-off (PSMOO) operation is described in Figure 14.
PSMOO requires an RTC to maintain time.
Figure 14: On/off mode operation
• When the receiver is switched on, it first enters the "Acquisition" state.
• If it is able to acquire a valid position fix (one passing the navigation output filters) within the
time given by the Acquisition timeout, it switches to the "Tracking" state and the ONTIME
UBX-22038241 - R02
3 Receiver functionality Page 38 of 92
C1-Public