NEO-F10N-Integration manual
2.2.4.3 Low-speed course over ground filter
The CFG-ODO-USE_COG configuration item activates this feature and the CFG-ODO-
COGMAXSPEED, CFG-ODO-COGMAXPOSACC configuration items are used to configure a low-
speed course over ground filter (also named heading of motion 2D). This filter derives the course
over ground from position at very low speed. The output of the low-speed course over ground filter
is available in the UBX-NAV-PVT message (headMot field), UBX-NAV-VELNED message (heading
field), NMEA-RMC message (cog field) and NMEA-VTG message (cogt field). If the low-speed
course over ground filter is not configured, then the course over ground is computed as described
in section Freezing the course over ground.
2.2.5 Static hold
The static hold mode allows the navigation algorithms to decrease the noise in the position output
when the velocity is below a predefined "Static Hold Threshold" level. This reduces the position
wander caused by environmental factors such as multi-path and improves position accuracy
especially in stationary applications. By default, the static hold mode is disabled.
The CFG-MOT-GNSSSPEED_THRS configuration item defines the static hold speed threshold. If the
speed drops below the defined "Static Hold Threshold", static hold mode is activated. Once static
hold mode is active, the position output is kept static and the velocity is set to zero until there is
evidence of movement again. Such evidence can be velocity, acceleration, changes of the valid flag
(for example, position accuracy estimate exceeding the position accuracy mask, see also section
Navigation output filters), position displacement, etc.
The CFG-MOT-GNSSDIST_THRS configuration item defines the static hold distance threshold. If
the distance between the estimated position and the static hold position exceeds the defined
threshold, the static hold mode is suspended or deactivated until there is evidence of no movement.
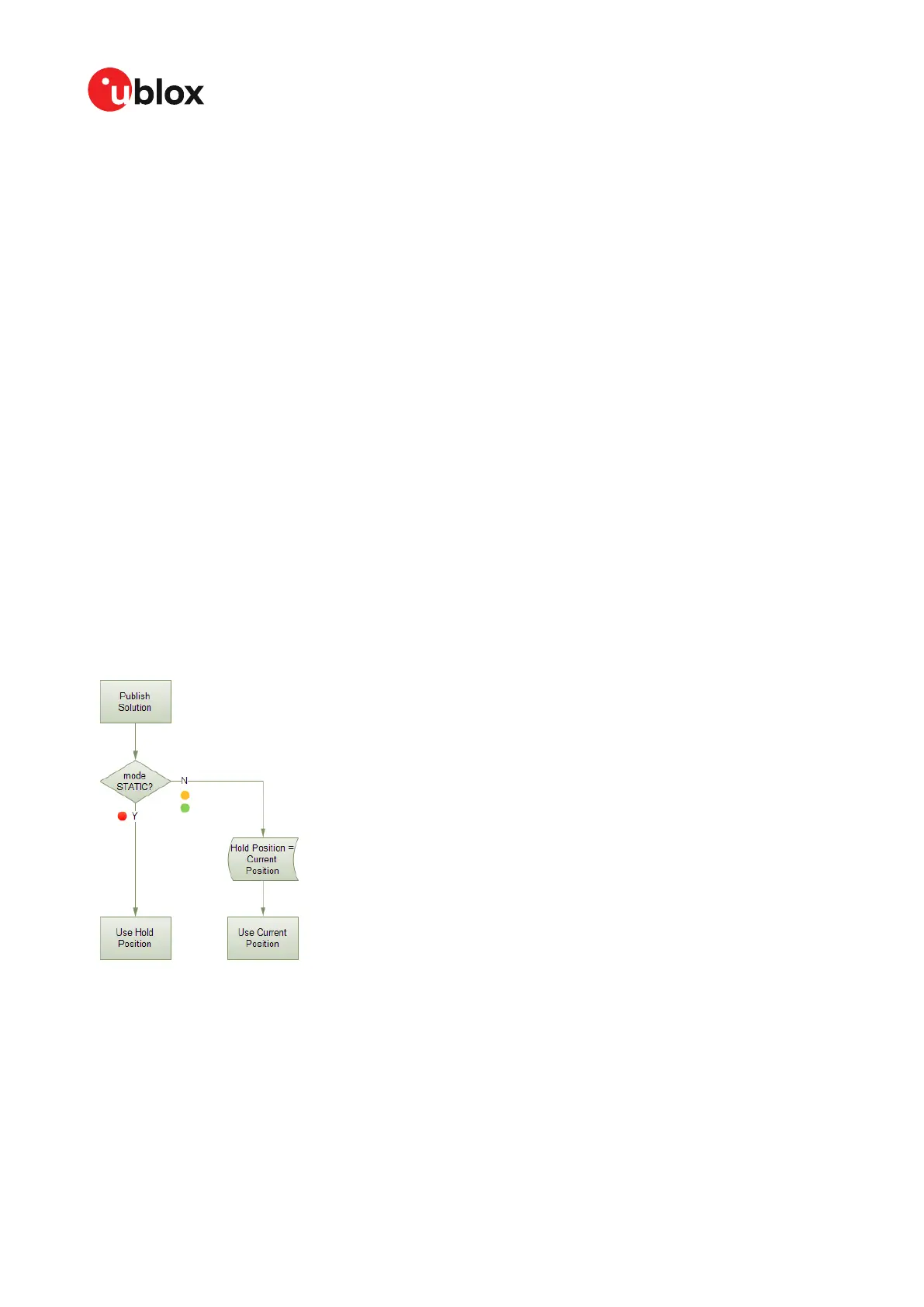
Figure 3: Position output in static hold mode
UBXDOC-963802114-12193 - R02
2 Receiver configuration Page 14 of 42
C1-Public

 Loading...
Loading...