GO1 User Manual
2021 Unitree All Rights Reserved 10
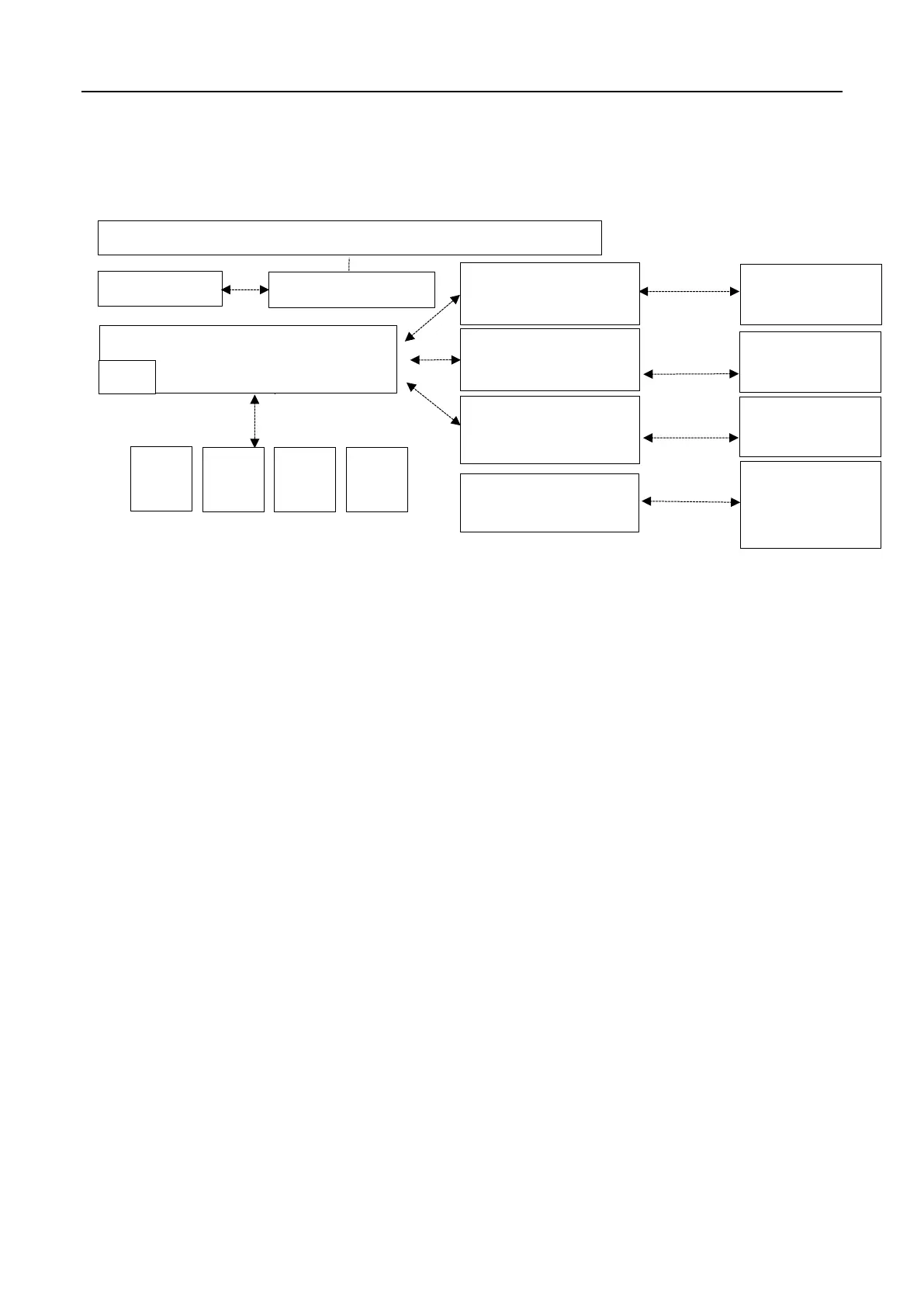
Robot internal architecture
GO1 uses a new hardware architecture and control system, control system as follows:
Robot Operating Mode
The following operating states and operating modes are supported:
Static standing state:
The static standing state refers to the state where the position of the robot body is at the initial height
after the machine is turned on, the body is level, and the handle is not operated. In this state, the power
consumption of the whole machine is the smallest, and the longest endurance time can be reached. The
3-axis attitude and 3-axis position control can be completed by the joystick
Sports mode:
After the robot is turned on, it will stand up on its own. At this time, it is in the movement mode and can
complete walking, fast running and other sports.
Accompanying status:
After the robot dog is turned on, the head light strip will flash after 1 min. At this time, the robot can be
accompanied by the tag controller. The robot can dynamically follow the controller and avoid obstacles
dynamically in real time.