9.Stopping Time and Stopping Distance
You can set user-defined safety rated maximum stopping time and distance. See 2.1.
Introductionon page15 and Safety Menu Settings.
If user-defined settings are used, the program speed is dynamically adjusted to always comply with
the selected limits.
The payload CoG is at the tool flange.
The graphical data provided for Joint 0 (base), Joint 1 (shoulder) and Joint 2 (elbow) is valid for
stopping distance and stopping time:
•
Category 0
•
Category 1
•
Category 2
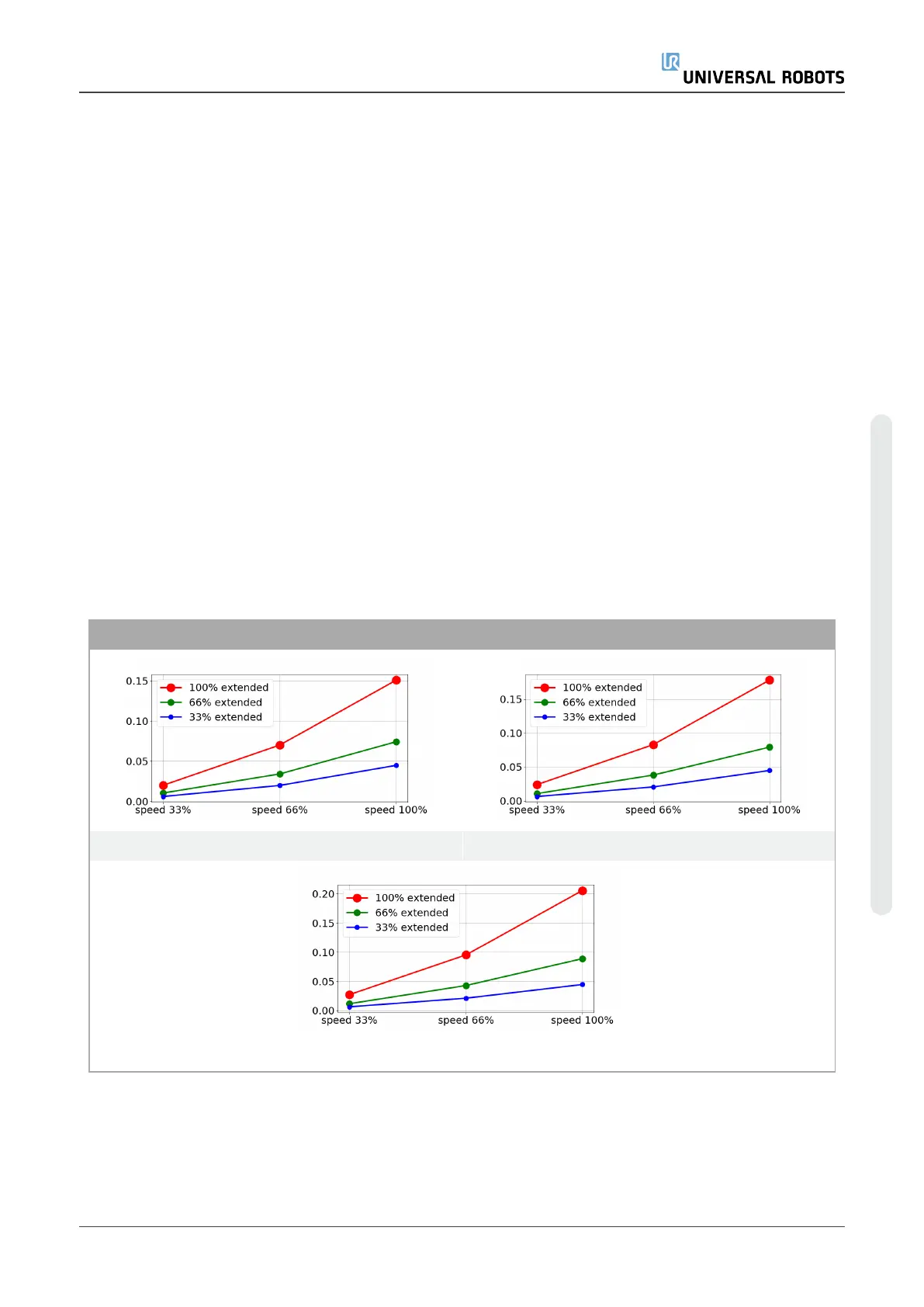
The Joint 0 test was carried out by performing a horizontal movement, where the rotational axis
was perpendicular to the ground.
During the Joint 1 and Joint 2 tests, the robot followed a vertical trajectory, where the rotational
axes were parallel to the ground, and the stop was performed while the robot was moving
downward. The Y-axis is the distance from where the stop is initiated to the final position.
Stopping distance for joint 0 (BASE)
Stopping distance in meters for 33% of 5kg Stopping distance in meters for 66% of 5kg
Stopping distance in meters for maximum payload of 5kg
Hardware Manual 65 UR5e
9.Stopping Time and Stopping Distance
Copyright © 2009–2022 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










