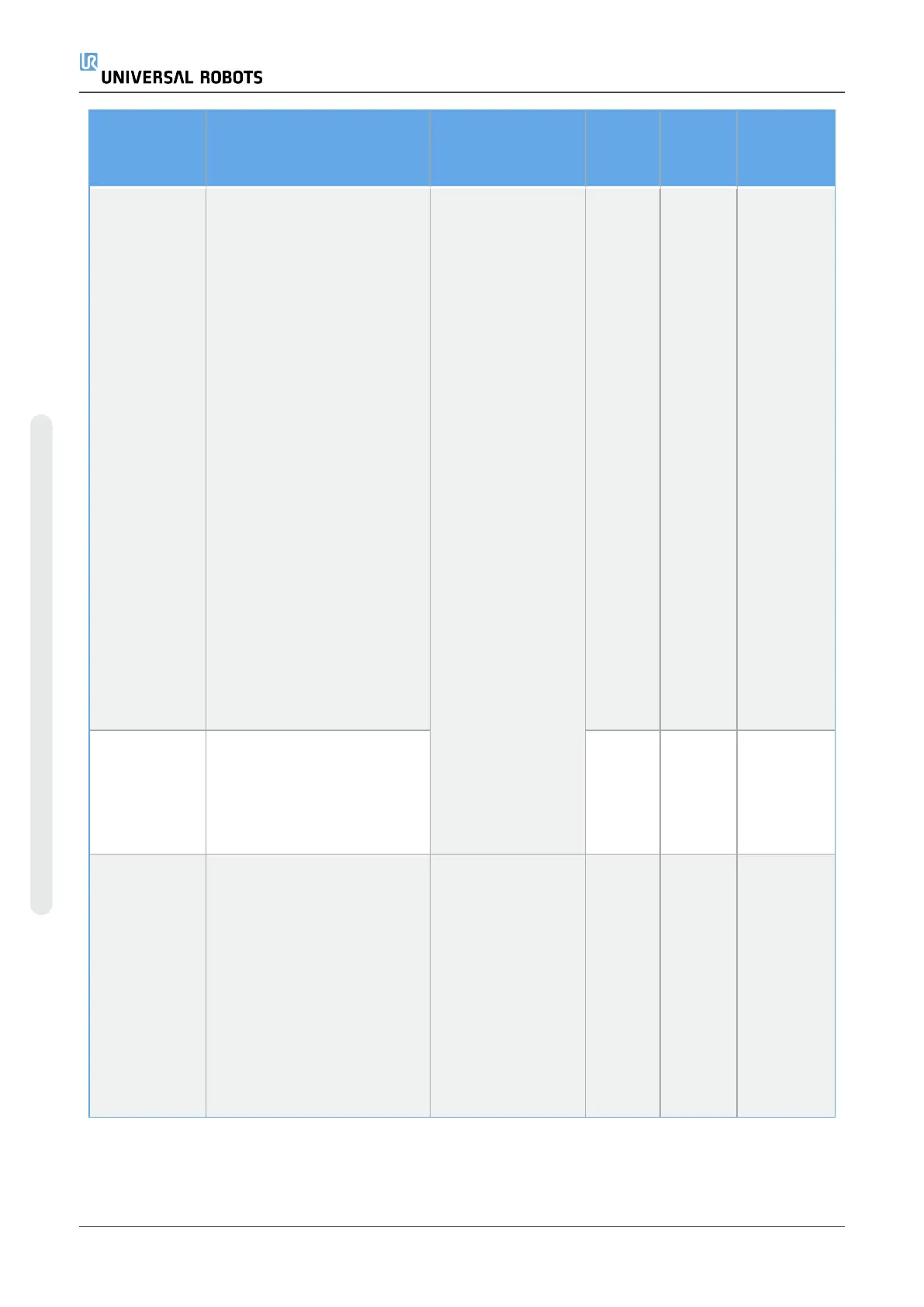
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
SF7
Force Limit
(TCP)
The Force Limit is the force
exerted by the robot at the
TCP (tool center point) and
“elbow”. The safety
function continuously
calculates the torques
allowed for each joint to
stay within the defined
force limit for both the TCP
& the elbow. The joints
control their torque output
to stay within the allowed
torque range. This means
that the forces at the TCP
or elbow will stay within the
defined force limit. When a
monitored stop is initiated
by the Force Limit SF, the
robot will stop, then “back-
off” to a position where the
force limit was not
exceeded. Then it will stop
again.
Will not allow
motion to exceed
any limit settings.
Speed or torques
could be reduced
so motion will not
exceed any limit.
A protective stop
will be initiated to
prevent exceeding
any limit. Will not
allow motion to
exceed any limit
settings.
25N 1.50E-
07
TCP
SF8
Momentum
Limit
The momentum limit is
very useful for limiting
transient impacts. The
Momentum Limit affects
the entire robot.
3 kg
m/s
1.20E-
07
Robot
SF9
Power Limit
This function monitors the
mechanical work (sum of
joint torques times joint
angular speeds) performed
by the robot, which also
affects the current to the
robot arm as well as the
robot speed. This safety
function dynamically limits
the current/ torque but
maintains the speed.
Dynamic limiting
of the
current/torque
10 W 1.50E-
07
Robot
UR5e 92 Hardware Manual
15.Safety Functions Tables
Copyright © 2009–2022 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










