Specialized Concentrated Focused
Wiring「21」
3.6.5 Parameter Setting of PANASONIC MINAS_A4 Servo
Driver
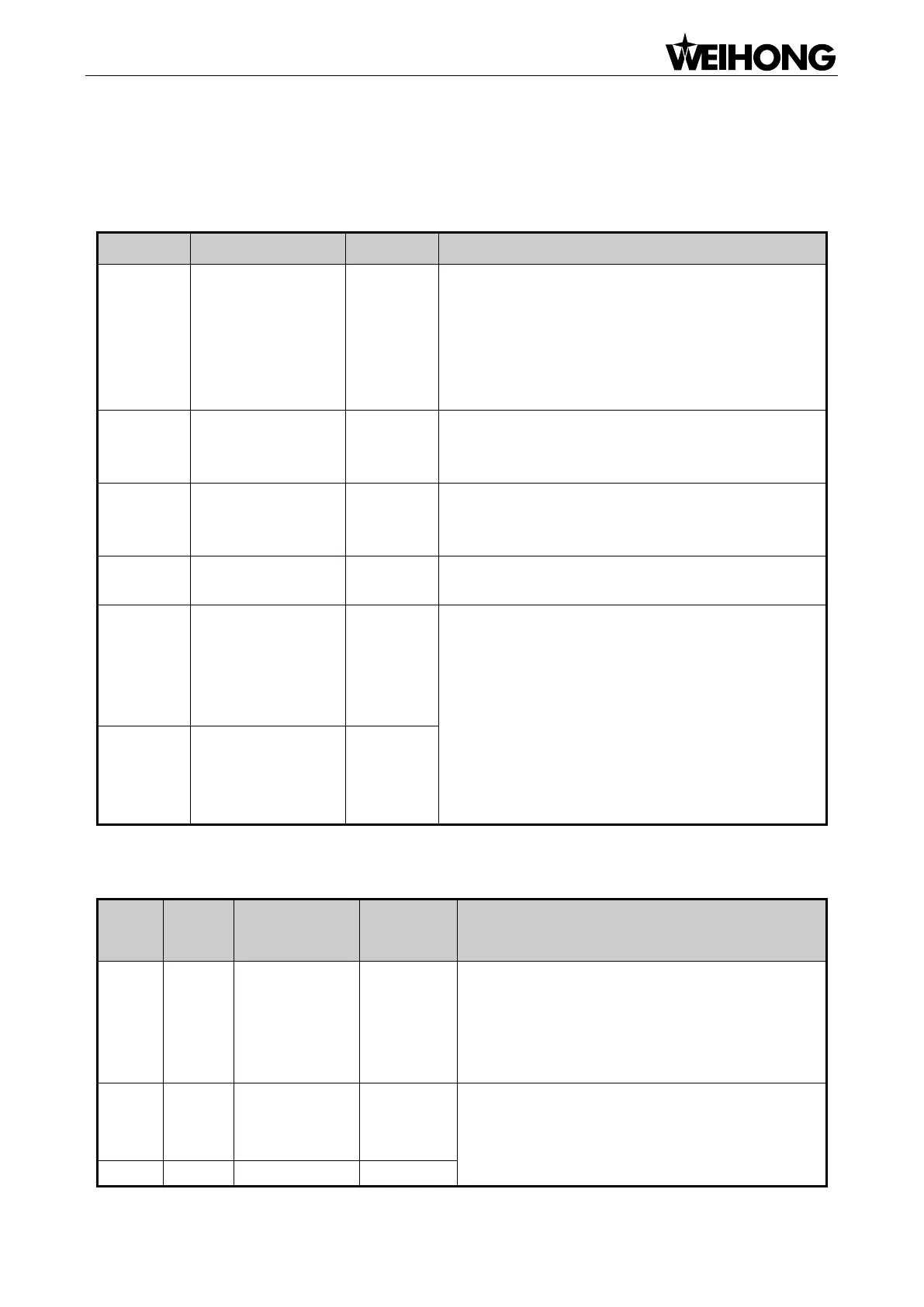
Monitor if the number of sent and received pulse is
correct by setting this parameter. In Weihong
control system, the correct quantity of pulse sent by
control card is detected by pulse inspection in order
to determine whether there is electrical
interference.
0: position mode
1: velocity mode
2: torque mode
Selection of
command pulse
input
1: input through exclusive difference circuit
Select command
pulse input mode
Set command pulse input mode: pulse + direction,
negative logic
Numerator of the
first pulse
command
frequency
multiplication
To be
calculated
Range:
1~10000
Typical values: pitch 5 mm, encoder resolution
10000, deceleration ratio 1:1, pulse equivalent
0.001 mm:
Pr48=10000
Pr4B=pitch 5mm / pulse equivalent 0.001mm=
5000
Pr48 / Pr4B=10000 / 5000=2/1
Denominator of the
command pulse
frequency
multiplication
To be
calculated
Range:
1~10000
3.6.6 Parameter Setting of MITSUBISHI MR-E Servo Driver
Control mode
selection and
regenerative
fittings
Bit 0: set 0: select position control mode.
Bit 1, select motor series: 0: HC-KFE; 1:HC-SFE.
Bit 3, select regenerative apparatus, set 0: not
use.
Bit 4, select motor power.
Numerator of
Electronic
Gear Ratio
CMX / CDV= command unit × servo motor
resolution × mechanical deceleration ratio /
screw pitch
E.G., pitch 5 mm, encoder resolution 10000,