Manual 35072 Vertex Compressor Control
Woodward 85
AGC is now configured at the current operating point. The gain factor will move above and below 1.0 as
the compressor moves from this operating point.
AGC may be configured before or after PID tuning, but in either case,
PID loops should be tuned with AGC disabled. Both PID tuning and
AGC configuration should be done with the compressor at the same,
or similar, operating conditions.
Decoupling
In order to maintain a stable system, Decoupling may be necessary to provide action before an upset
occurs. Upsets are anticipated from knowledge of the operating parameters and their relation to the
operation of the anti-surge valve. For instance, a pressure set-point change will usually require a speed
change, and this usually results in a compressor operating point change, in percent from the surge line.
By the nature of changing speed, S_PV changes and the Anti-Surge PID will respond. The decoupling
routines are designed to anticipate the PID change and preset the anti-surge system to the final position
without any PID action. Decoupling drives the system to stable operation much quicker than waiting for
the PID output to settle. Additionally, the dynamics of the anti-surge control may be too close in response
time to the pressure control/speed control and the two systems may fight. Decoupling will also drive this
situation to a stable point.
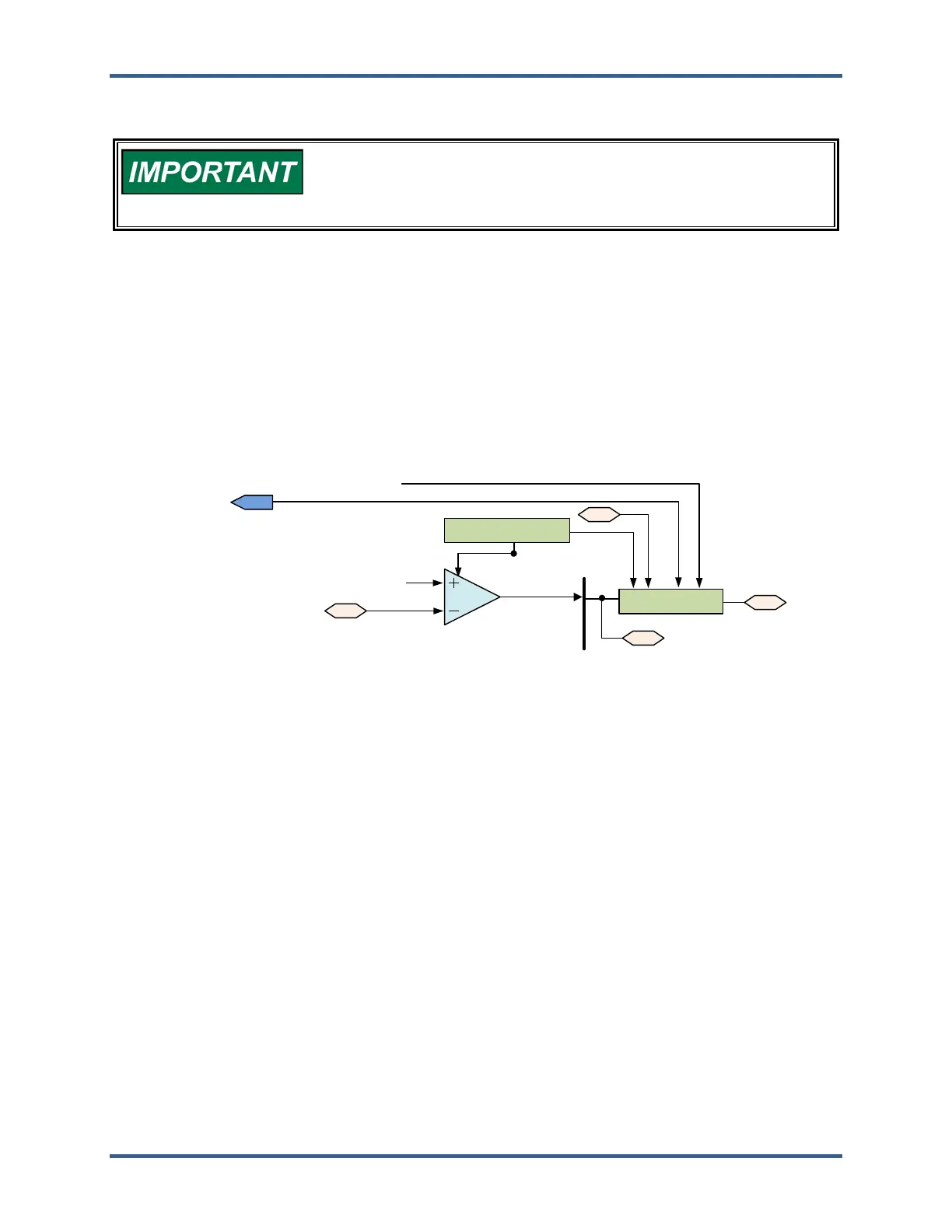
HSS
ANTI‐
SURGE
ADJACENTSTAGE
VAL VEPOSITION
100
P
DECOUPLING
INPUT#1
GAIN COM PENSATION
DECOUPLING
PID
ASO
S_PV
HSS
SPD
Figure 6-21. Anti-Surge Decoupling
There are four separate Decoupling routines: two based on speed, one configurable inputs from separate
processes, and one based upon an adjacent compressor section’s anti-surge valve. Decoupling is
enabled as a whole. Disabling any of the four routines individually is done by configuring their respective
“Amounts” to 0.0. In addition, the action is not allowed to influence the anti-surge valve until the
compressor is on-line and in Automatic Mode. Also, since there is no need to manipulate the anti-surge
valve if the compressor is operating far from the Surge Control Line, Decoupling is inhibited if the current
S_PV value is greater than the configured “S_PV Range” value. Moreover, since Decoupling is a
supplemental function, the configured “Decoupling Output Limit” limits not a primary control, its output.
The sum of all five decoupling responses may not open the valve more than this amount.
As mentioned previously, speed decoupling can be performed in two cases, one to prevent a surge and
the other to stabilize the process. Once the compressor is stable at an operating point, a decrease in
speed would move the operating point towards surge. The first form of speed decoupling uses a direct
relationship from change in speed to generate the appropriate valve movement. This form is called
“dynamic” and is fast acting and momentary. It is configured as the “Fast Speed Amount” in percent per
rpm. Usually, the relationship of speed to S_PV is direct so this value is set greater than zero. The time
constant is configured as “Fast Speed Delay Time” and represents the total length of time that the
decoupling action will last. Gain Compensation impacts fast Speed Decoupling, so the decoupling should
not be configured until after gain compensation has been configured.

 Loading...
Loading...






