Programming
31
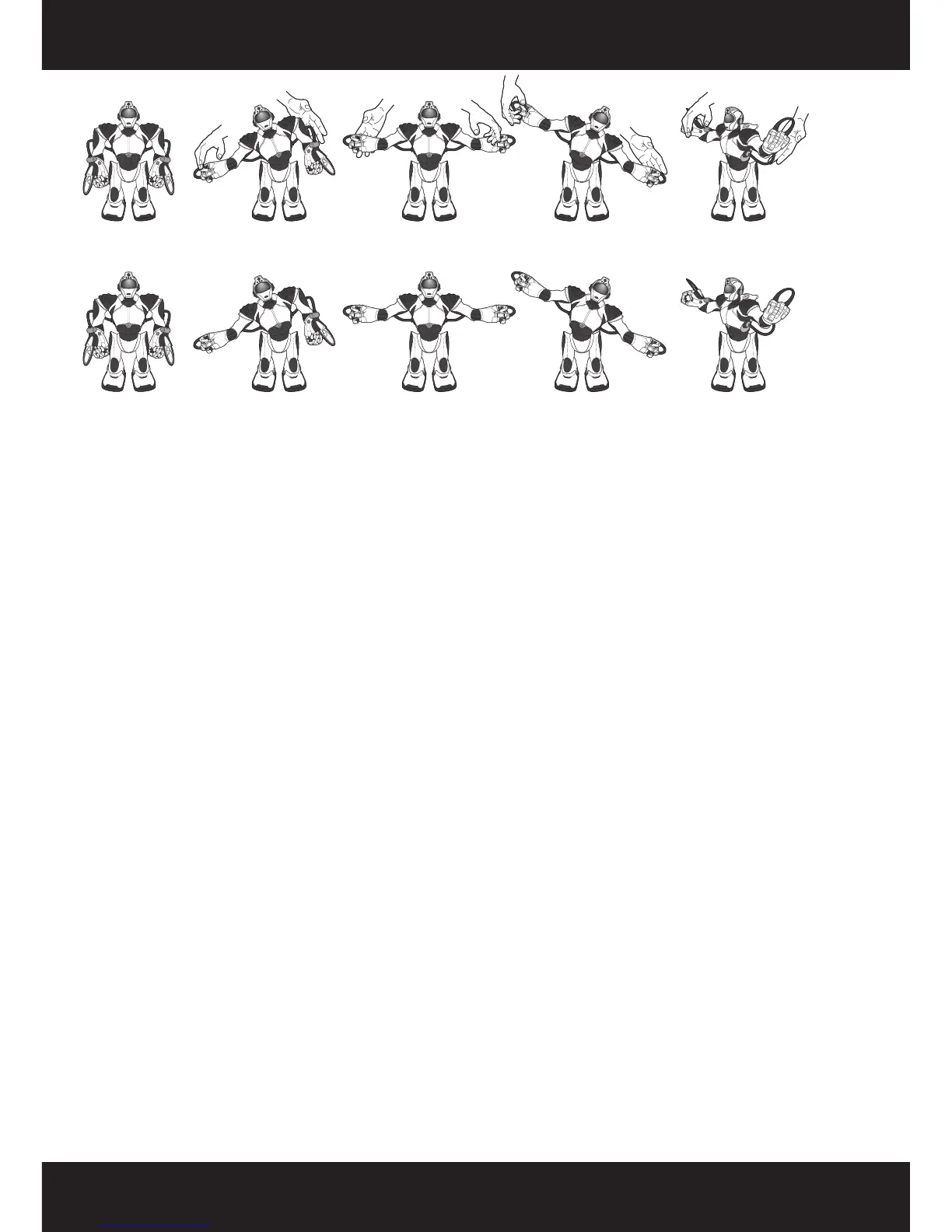
• If you stop programming for about 3 seconds Robosapien™V2 will
exit the program mode and then repeat the moves.
• Do not force Robosapien™V2 to move beyond his mechanical limits
or move him too fast.
• If you move him into a position that is unsafe (for example, if you
make him lean too far forward or backward so that he falls over),
he will self adjust when he plays back the moves.
• In positional program mode you can combine upper body movements
with leg moves and walking using the foot sensors:
Touch front x 1
Robosapien™V2 will take several steps in a walking turn towards
the side of the foot that was touched.
Both front
Robosapien™V2 will take several steps forward.
Both rear
Push both back sensors to make him reverse several steps.
Front and opposite side back sensors = turn
Pressing the front right sensor and the back left sensors (or vice
versa) will make Robosapien™V2 perform a turn towards the
forward touched foot.
Front and Back of same foot = kick
Touch both sensors on the same foot and Robosapien™V2 will kick
that foot forward.