Programming
Sensors
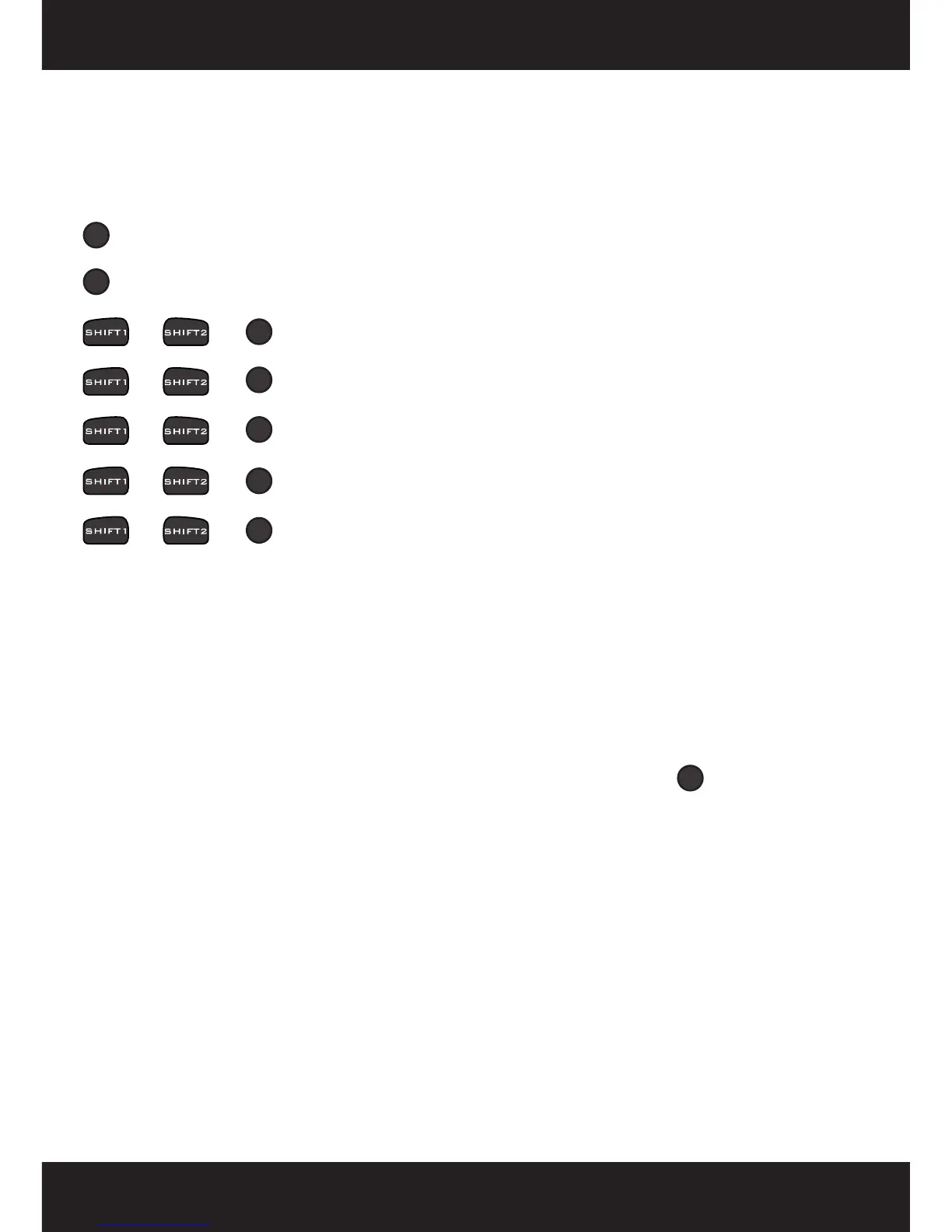
PROGRAMMING KEYS
Programming can be split into two different categories: Controller
and Positional, each of which have 3 program modes.
= POSITIONAL PROGRAM – ENTRY
= POSITIONAL PROGRAM – PLAY
+ + = SOUND PROGRAM
+ + = VISION PROGRAM
+ + = MAIN PROGRAM
+ + = PERFORM PROGRAM/EXIT PROGRAM
+ + = CLEAR ENTRY
POSITIONAL PROGRAM CATEGORIES (PUPPET MODES)
You can program Robosapien™V2 manually by moving his body into
different positions using one of the three positional
program modes: Main Positional, Left Positional and Right
Positional.
MAIN POSITIONAL PROGRAM MODE
This mode is accessed using the controller button Positional
Program Entry. After he acknowledges that he is in the mode, you
can start to program him.
• The position of his body when you enter the program mode is
stored as the start position. He will return to this position
whenever the program is activated.
• Move his arms and upper body around manually.
• Each time you stop moving him, he will store the position and
acknowledge it by saying “Okay”. You can move his shoulders,
wrists, waist-lean back and forward, waist-lean side to side, and
waist twist motors.
• You can move more than one motor at the same time, i.e., you can
move both arms up together, or you can make him reach out in
front while bending forward to the side.