In this way, the response of setting parameters is fast, and the overshoot is restrained.
The adjustment is suitable for the mechanism with lower rigidity such as synchronous
belt mechanism.
It is suitable for the adjustment of high rigidity mechanism such as ball screw
mechanism. Please select this type when there is no corresponding structure.
The adjustment is suitable for rigid body system and other mechanisms with high
rigidity.
Soft gain adjustment. In addition to gain adjustment, the notch filter is also adjusted
automatically
Make special adjustment for positioning purpose. In addition to gain adjustment, the
model loop gain and notch filter are also adjusted automatically
fast
positioning
(control
overshoot)
Pay attention to the adjustment of no overshoot in the positioning purpose. In addition
to gain adjustment, the model loop gain and notch filter are also adjusted automatically
Model loop function
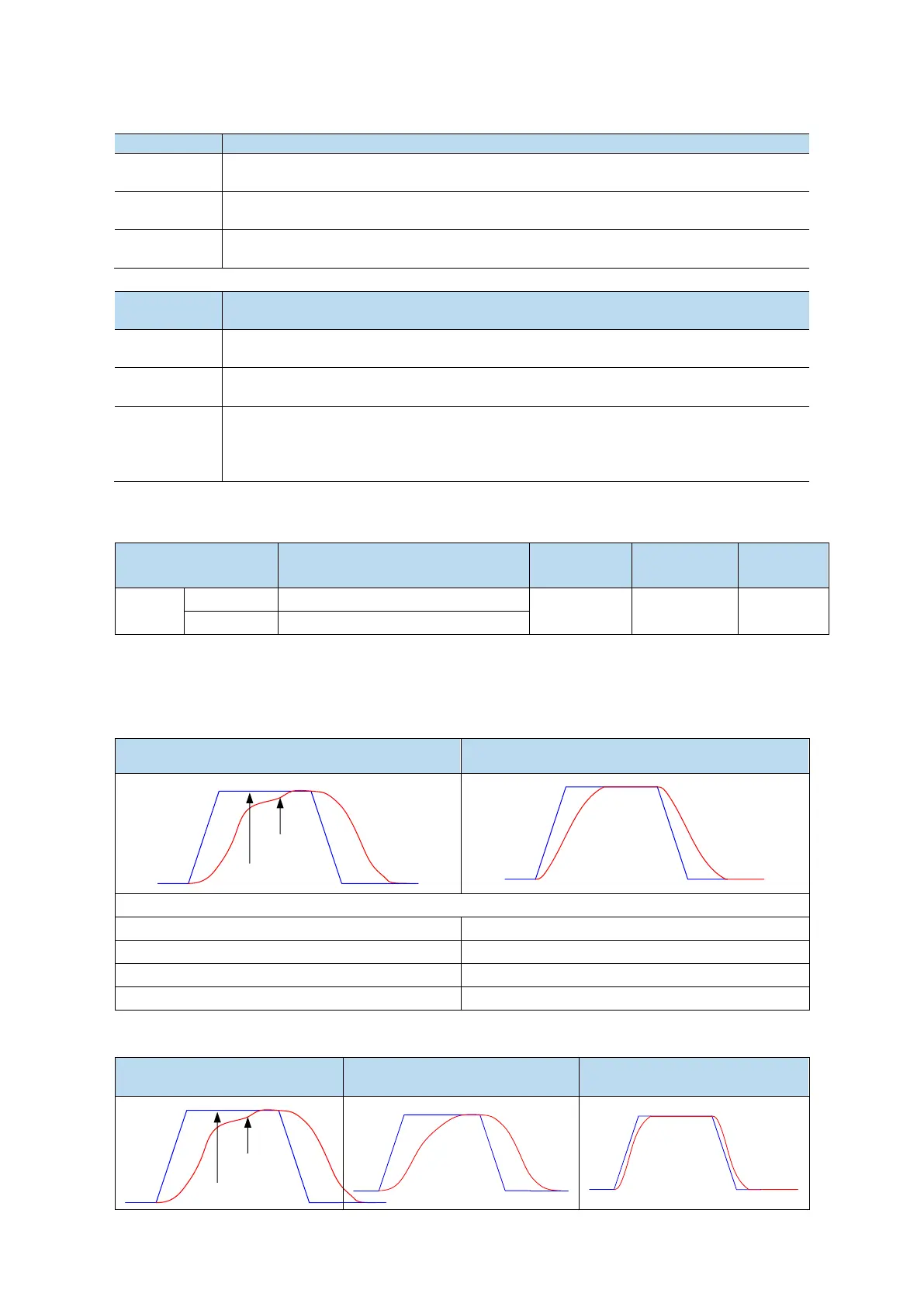
Taking DS5 series servo auto-tuning mode and using 750W servo 5 times load inertia as an example:
Model loop function turns off (soft mode)
Low Rigidity and Low Response
High Rigidity and Medium Response
Speed
instruction
Speed feedback
Load inertia ratio P0-07: 500%
speed loop gain P1-00: 200
speed loop gain P1-00: 800
speed loop integral P1-01: 3300
speed loop integral P1-01: 825
position loop gain P1-02: 200
position loop gain P1-02: 700
Phenomenon: Running jitter, slow response
Phenomenon: smooth operation and fast response
Model loop function turns on (fast positioning or fast position(control overshoot))
Low Rigidity and Low
Response
High Rigidity and Low Response
High Rigidity and High
Response
Speed
instruction
Speed feedback

 Loading...
Loading...