GILLETTE ŁÓDŹ
Robotic station for packing FFS1 dispensers
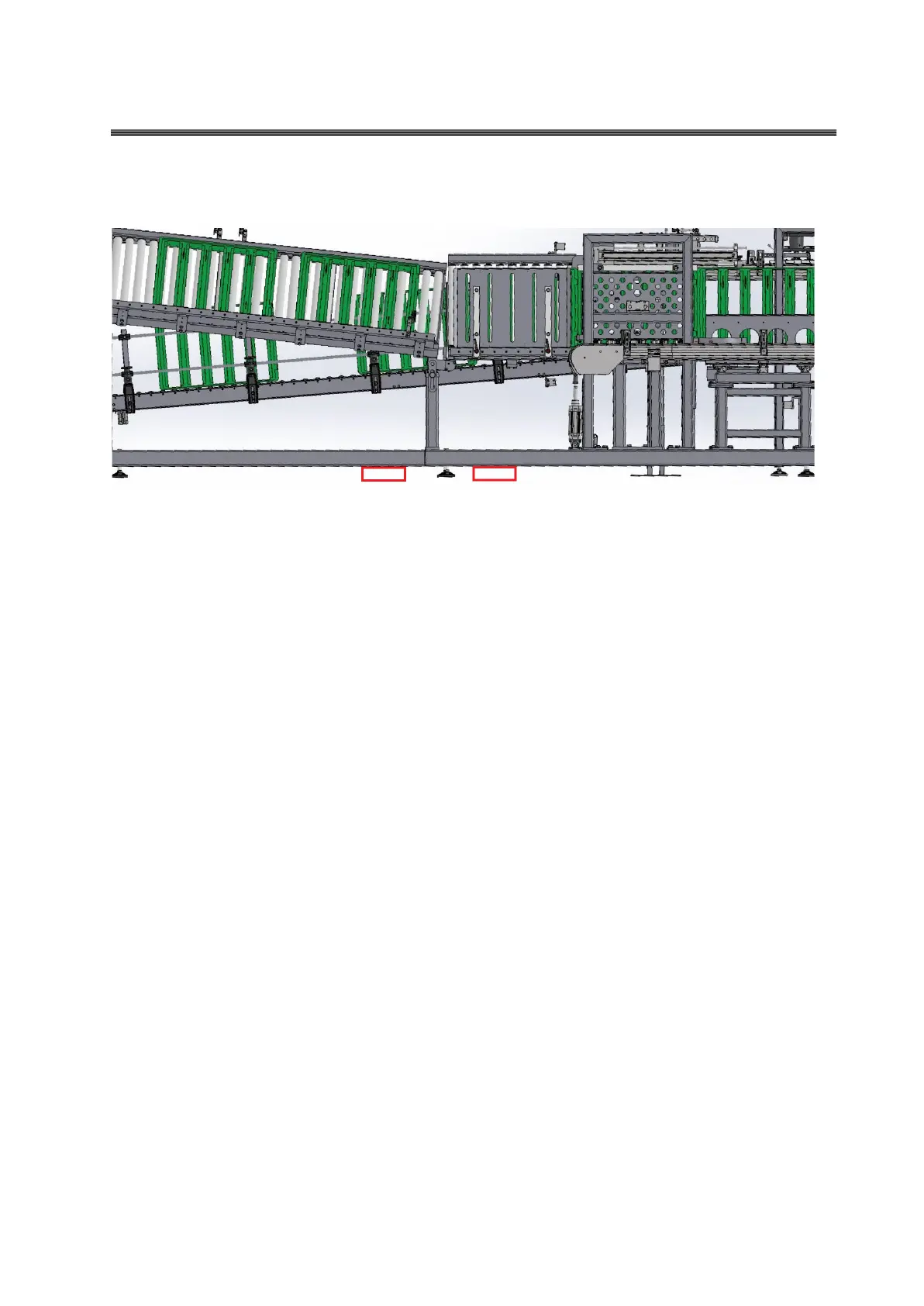
Figure 55 Method of using a forklift to transport box feeders
5.14 EMERGENCY SITUATIONS
5.14.1. Internal or external emergency stop
Reasons for triggering the condition
- An emergency stop condition is triggered by pressing one of the seven
EMERGENCY STOP buttons
Exit method (Described in detail in point 5.3)
5.14.2. Collision of the gripper with the station element
Reasons for triggering the condition
- Gripper error
- Error in the program
Way out
- Start the robot in manual mode and enter the station (Described
in detail in point 5.5)
- Take the robot out of the collision situation with extreme
caution and remove the consequences of the collision.
- Move the robot to a safe position (HOME), lock the door
and start the system in automatic mode (Detailedly described in point 5.4)
ABB Sp. z o.o.
Side 99/135
DTR_GILLETTE_ZSDPD_Farmores1_IRB360_2015_v03