Action
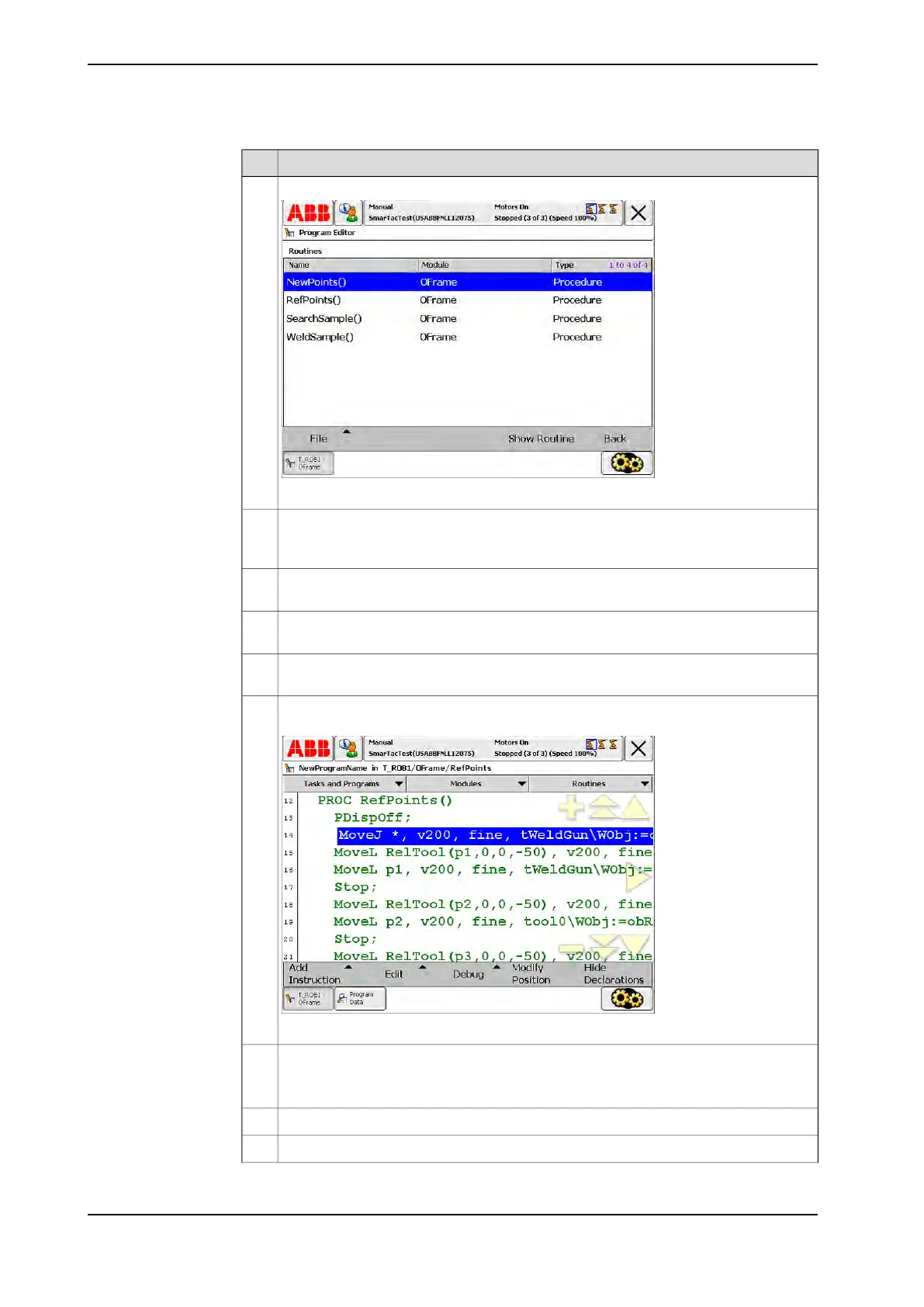
View the routines in the module. You should see the following routines:
xx1400001512
2
Mark three points on the surface of the plate and label them p1, p2, and p3. The
location of the points is not critical, but they should be near the corners as shown in
Reference sketch on page 63 or step 14.
3
Move the program pointer to the procedure RefPoints. RefPoints is a routine that,
once updated, will point out the three reference points.
4
Execute the instruction PDispOff at the beginning of the procedure using the forward
button. (This ensures that no displacements are active.)
5
Jog the robot so that the torch is situated about 150 mm above the plate surface and
pointing down at the plate.
6
Move the cursor to the first MoveJ and modify the position. You may have to change
your settings in the Jog Window to reflect the work object change.
xx1400001513
7
Jog the robot so that the torch TCP is just touching the p1 mark, and modify the
second MoveL.
MoveL p1, v200, fine, tWeldGun\WObj:= obREF;
8
Jog the robot to the p2 mark and modify the MoveL: MoveL p2, v200…9
Jog the robot to the p3 mark and modify the MoveL: MoveL p3, v200…10
Continues on next page
64 Application manual - SmarTac
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.7.3 Exercise 5: object frame manipulation
Continued