115
GB
THE ROBOT’S FUNCTIONS
Basic operating principles of the robot
lawnmower
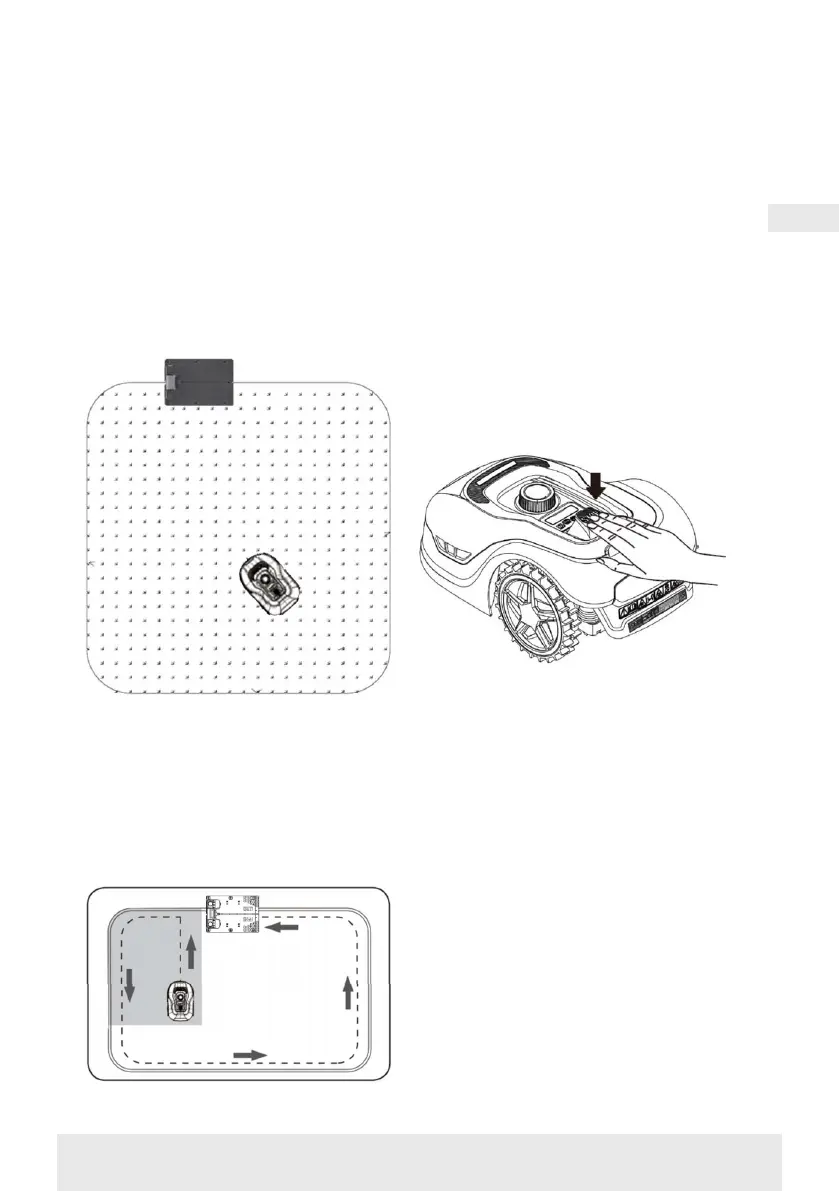
The robot lawnmower selects the driv-
ing pattern randomly. This means that
it does not follow any particular pattern,
but simply moves randomly around the
garden. The advantage of this is that
over a period of one week's mowing, it
will reach the entire lawn area within
the boundary wire.
Driving to the charging station
When the battery is discharged, the
robot lawnmower will search for
the nearest boundary wire and then
automatically drive (without mowing)
counter-clockwise back to the charging
station. Here, it will charge up fully and
then continue its cutting cycle.
Recognising the boundary wire
When the robotic mower approaches
the boundary wire, the sensors installed
in the front of the cover will detect it.
However, to ensure the best cutting
result, the robot will run beyond the
boundary wire by about 10-12 cm at the
front (do not cut here).
This is important to remember when
laying the boundary wire in the garden.
Stopping the robot
If you want to stop the robotic mower
while it is mowing or returning to the
charging station, the red STOP button
must be activated/depressed.
Adjusting the cutting height
The robotic mower’s cutting height can
be adjusted from 20 to 60 mm.
If the grass is higher than 60 mm when
the robot is installed, you will need to
mow the grass with a regular mower
first. Otherwise, there will be too much
load on the robot's blades, resulting in
very poor cutting results, and the ma-
chine will get stuck easily.
It is recommended that you start by
setting the cutting height to max. (60
mm) and gradually lower the cutting
height over a few days until the desired
grass height is achieved.
The cutting height is set by press-
ing the STOP button (if the robot is
running). When the robot is stationary,