the arm has been recorded before.)
Operating steps:
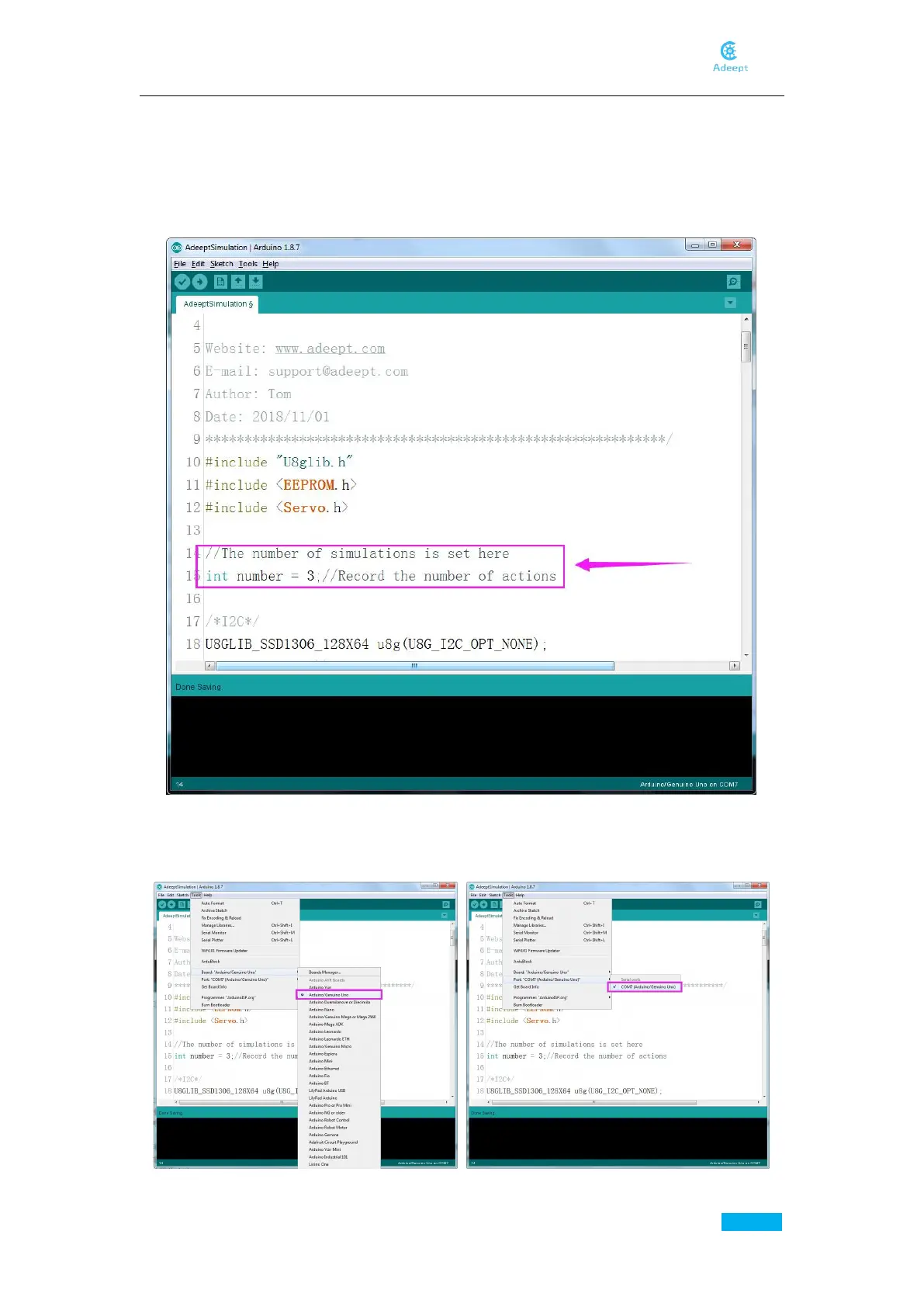
Step 1: Open the Arduino program AdeeptSimulation.ino. First, estimate how many steps the
robotic arm need to complete. For example, 3 steps, 15 steps, 200 steps, etc., 333 is the
maximum.
Step 2: Connect the robotic arm to the computer with the USB cable. (Note: Do not turn on the
power supply when downloading the program to prevent damages of swinging arm.) Select the
board model and port in Arduino IDE.