7. Turn on the power and debug the servo.
Before switching on, you need to insert the configured SD card into the Raspberry Pi. For details,
please refer to the third chapter of the document. That in the next operation, the Pi Camera of
the Raspberry Pi should always be connected to the Raspberry Pi, and do not reverse the wires of
the Raspberry Pi. Otherwise, the servo will not rotate to the middle position after booting.
If SD card is not inserted, the servo needs to be rotated to the middle position manually.
After debugging, remove the servo and battery holder, and take the 18650 batteries out of the
Holder Set. Do not rotate the rotation axis before the servo fixed to the rocker arm. Otherwise,
you need to re-debug the servo.
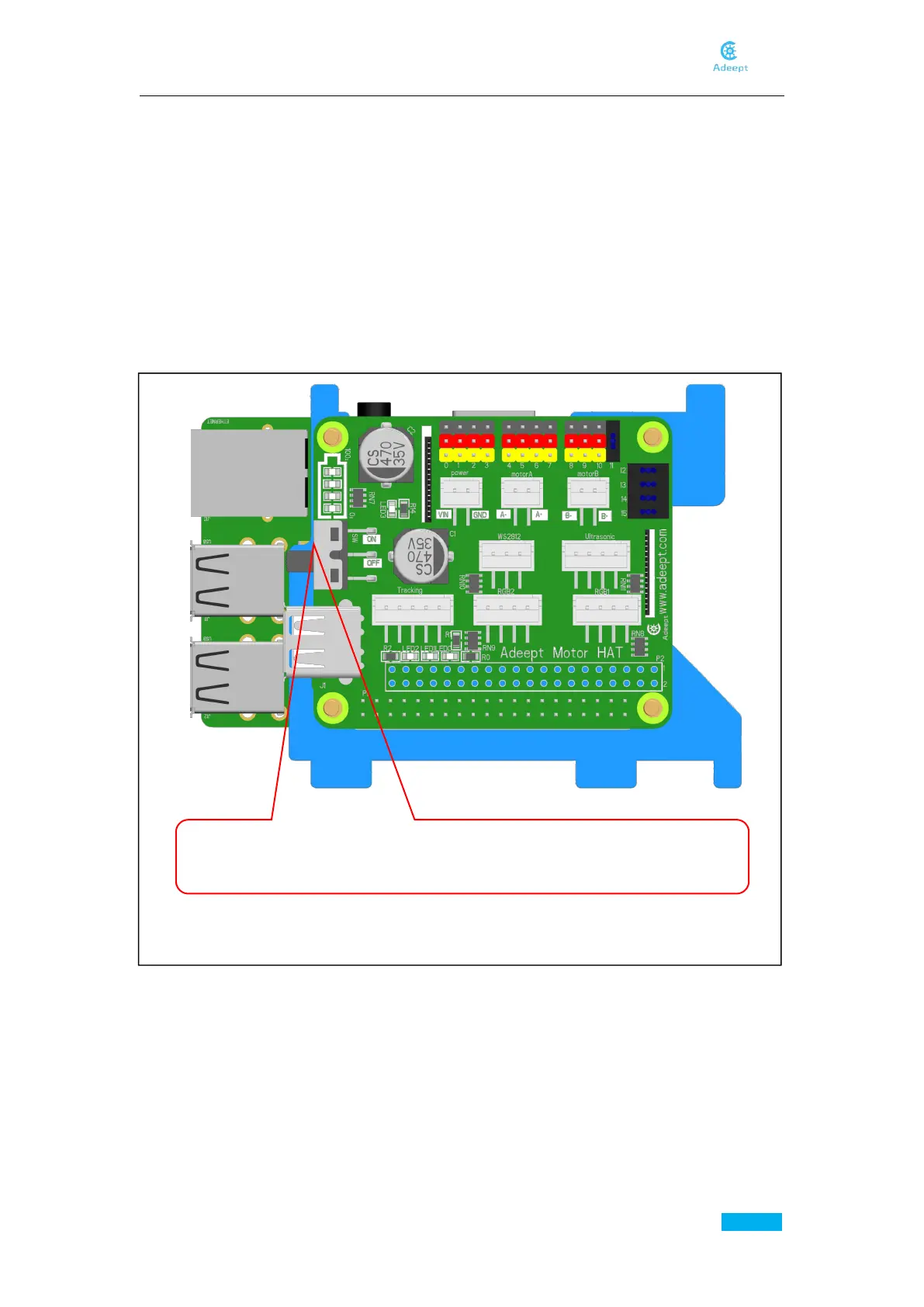
Turn the switch here to “ON” (power on), the servo will automatically rotate to the
initial position. Wait a few seconds till the servo stop, and then turn the switch to
“OFF” (power off).