2.4. End Part Installation Instructions
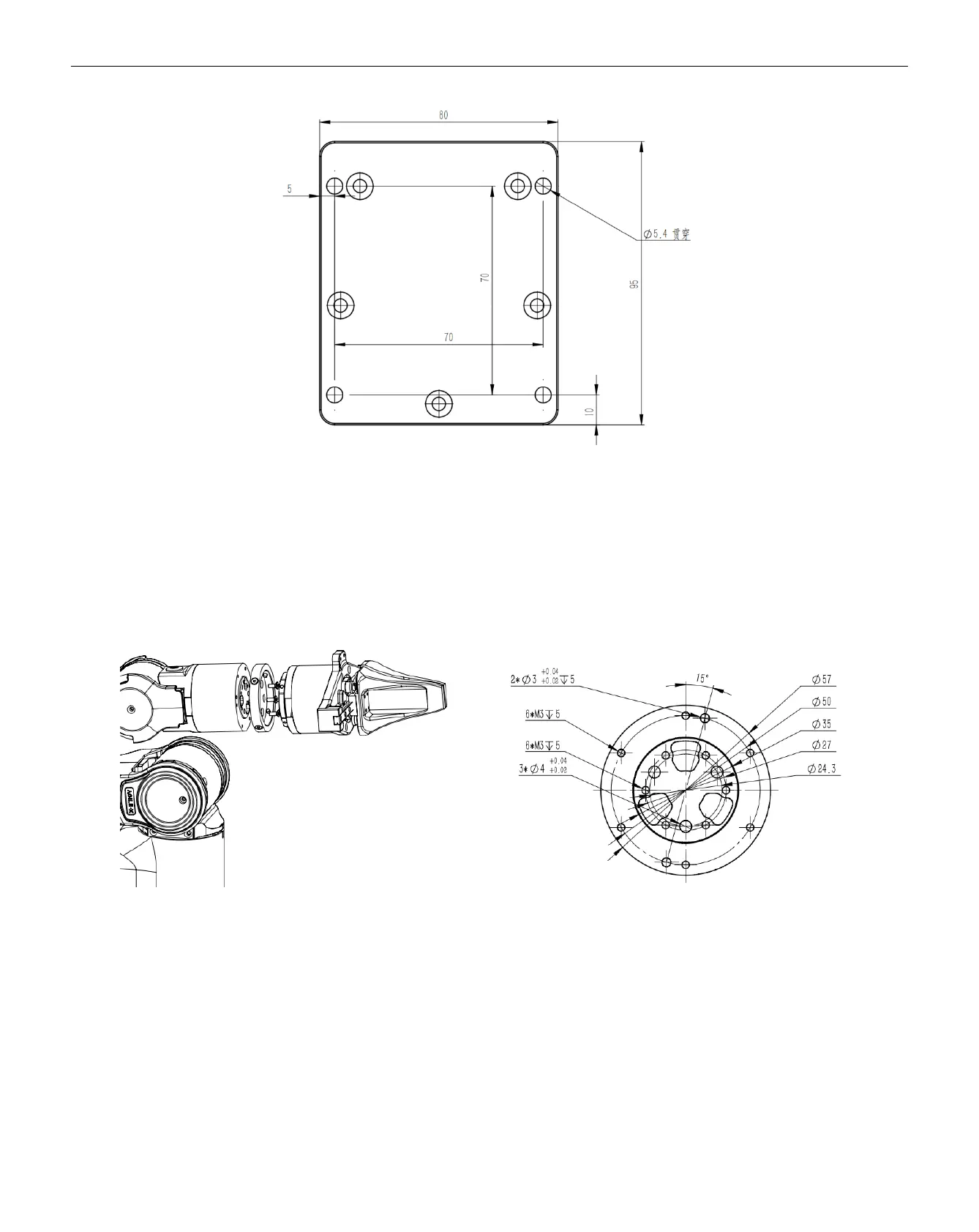
The end can be equipped with other tools via a flange. Optional accessories include a two-finger gripper and a teach pendant. The
installation method is shown in the diagram below. Details of the two-finger gripper and teaching device parameters can be found
in the technical specifications at the end.
3. ArmRobotUA Host Computer Usage Instructions
Software Download:
Link: https://drive.google.com/file/d/1771e87UGdkGwgVuO4XFAio8x4Uajmneh/view?usp=drive_link
Using a PC with Windows 7 or higher, double-click to open the host computer software. Through this human-machine interaction
software, you can operate the robotic arm and read feedback data from the external network of the robotic arm. The user interface
is shown as follows: