PiPER Robotic Arm Quick Start User Manual AgileX Robotics
AgileX Robotics
4. Secondary Development
Currently, the robotic arm supports secondary development through a Python SDK and ROS1 driver package. For detailed secondary
development instructions, please refer to the GitHub link.
SDK:https://github.com/agilexrobotics/piper_sdk
ROS1:https://github.com/agilexrobotics/Piper_ros/tree/ros-noetic-no-aloha
ROS2:https://github.com/agilexrobotics/Piper_ros/tree/ros-foxy-no-aloha
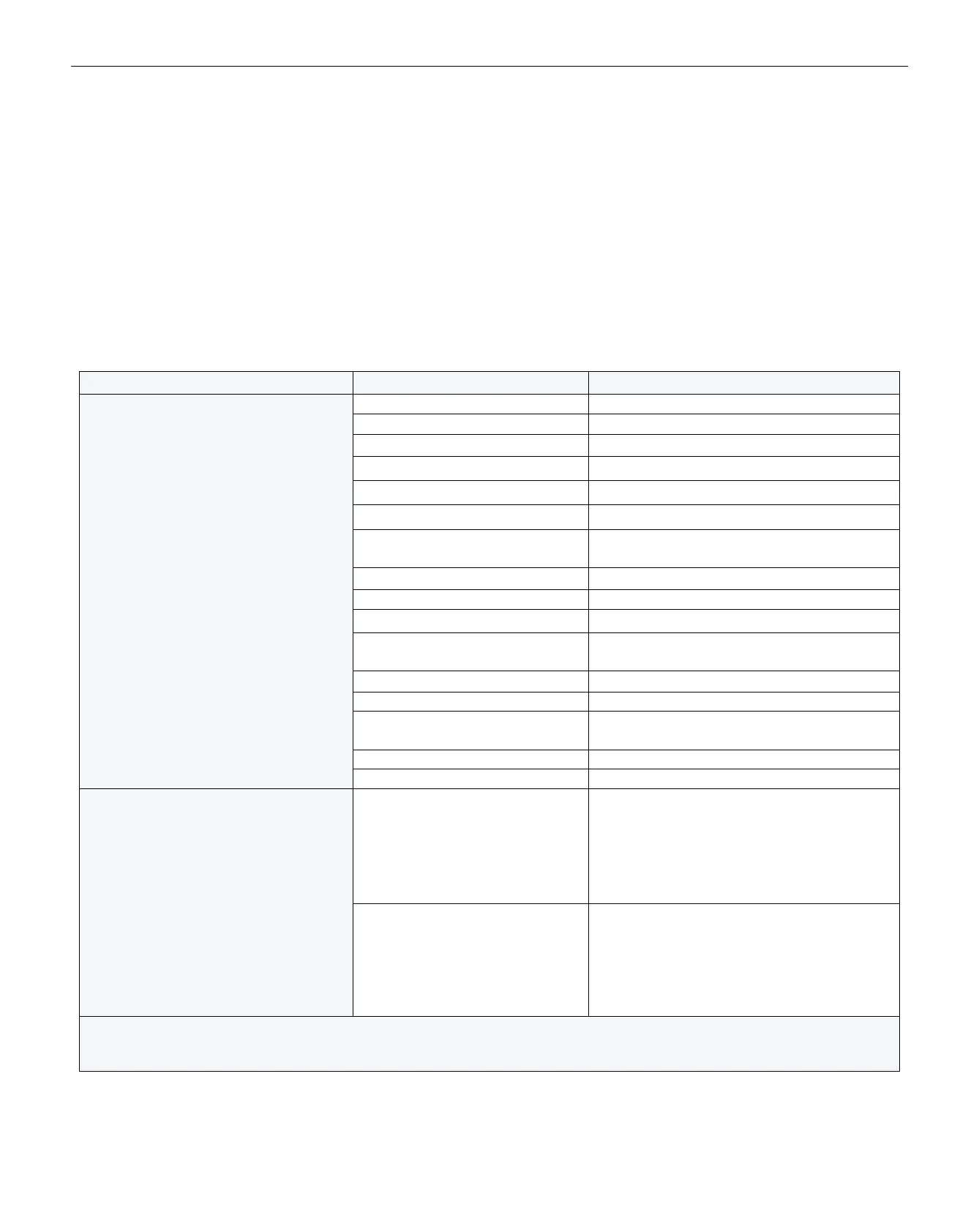
5. Technical Specifications
Robotic Arm Specifications:
Standard Power Supply Voltage
DC24V (Min: 24V, Max: 26V)
Max Power ≤ 120W, Comprehensive Power ≤
40W
Aluminum Alloy Frame, Plastic Shell
Teach by Dragging / Offline Trajectory / API /
Host Computer
Power Interface x1, CAN Interface x1
Temperature: -20 to 50℃, Humidity: 25%-85%,
Non-condensing
Compatible with all AgileX robotics products
J1:±154°
J2:0°~195°
J3:-175°~0°
J4:-106°~106°
J5:-75°~75°
J6:±100°
J1:180°/s
J2:195°/s
J3:180°/s
J4:225°/s
J5:225°/s
J6:225°/s
Note: The above data are test results of the AgileX robotics arm in a controlled testing environment. Results may vary under
different environments and usage methods. Actual experience should be considered.