Rockwell Automation Publication 2198-UM004A-EN-P - October 2019 263
Motion Control in PR Mode Chapter 11
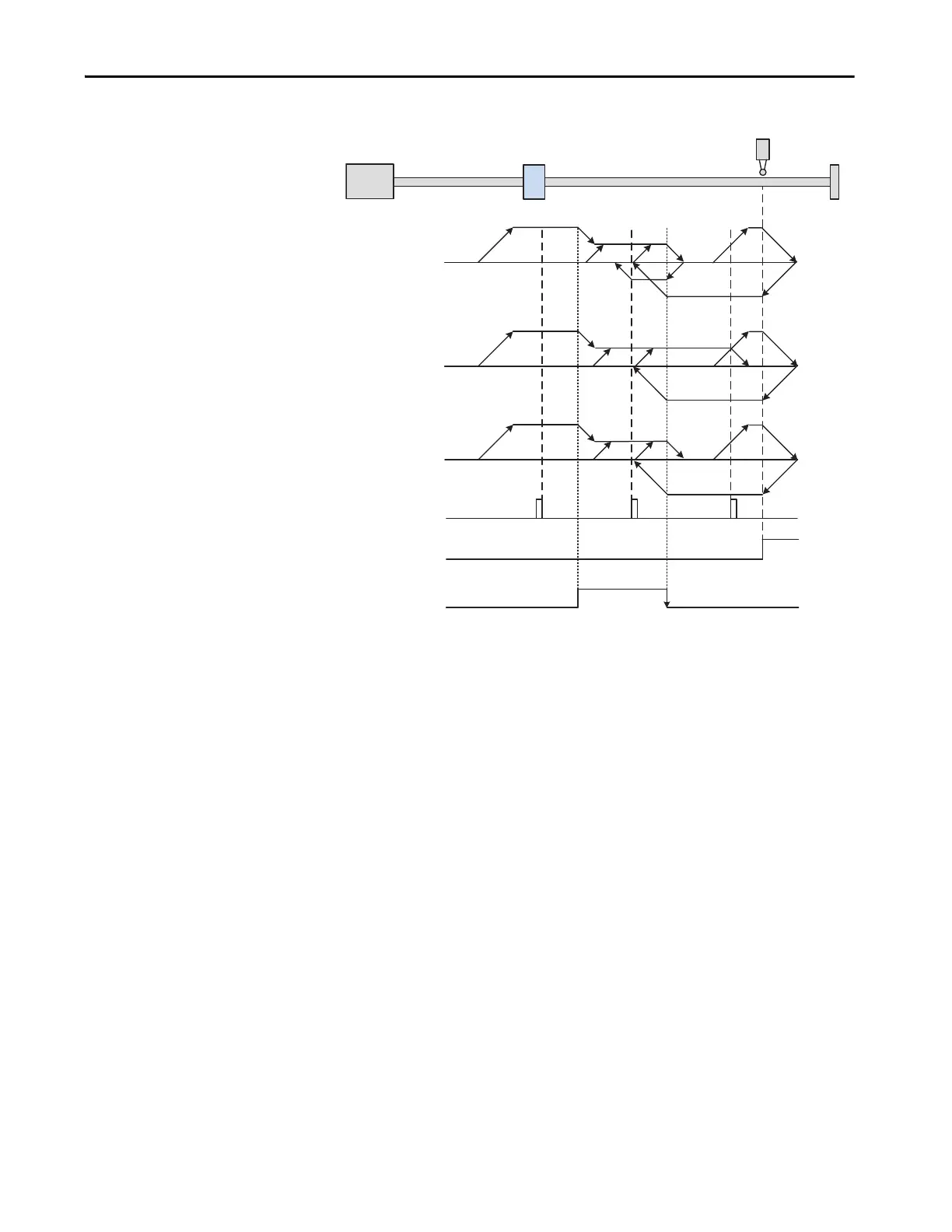
Figure 92 - ORG Signal (falling edge) as Reference Point
If ORG signal is un-triggered at the start point (low, Start point 1), the servo
motor runs at high speed (first speed setting) until reaching the rising edge of the
ORG signal. Then it decelerates and switches to low speed until the ORG signal
is off (low). Next, it reverses to look for the Z pulse and decelerates to a stop once
it finds the Z pulse, completing the homing.
If ORG signal is un-triggered at the start point and is closer to the limit switch
(Start point 2), the motor runs at high speed (first speed setting). You can set
whether to show an error or reverse the running direction when it reaches the
limit switch. If you set it to reverse direction, the motor operates in reverse to
reach the ORG signal. Once it reaches the ORG signal, it decelerates and runs at
low speed (second speed setting) until it reaches the falling edge of ORG signal.
Then it reverses to look for Z pulse. When found, the servo decelerates to a stop,
completing the homing.
If the ORG signal is triggered at the start point (high, Start point 3), the servo
motor operates at low speed (second speed setting) in the forward direction until
the ORG signal switches to low. Finally, the motor reverses to look for the Z pulse
and decelerates to a stop, completing the homing.
If you set it to look for the Z pulse or to not to look for the Z pulse in the forward
direction, which is similar to the first setting mentioned previously (going in the
reverse direction or not to look for the Z pulse).
Motor
Z pulse
Start point 1
Limit signal
Reverse to Z
End
Start point 1
Go forward to Z
End
Do not look
for Z
Start point 1
End
ORG signal
Limit
Start
point
3
Start
point 2
Start
point 2
Start
point 3
Start
point 3
Start
point 2
 Loading...
Loading...




