112 Rockwell Automation Publication 2080-UM002K-EN-E - March 2019
Chapter 7 Motion Control
PTO Channel Naming
Names of embedded PTO channels have the prefix EM (embedded) and each
available PTO channel is enumerated starting from 0. For example, a controller
that supports three axes will have the following PTO channels available:
• EM_0
• EM_1
• EM_2
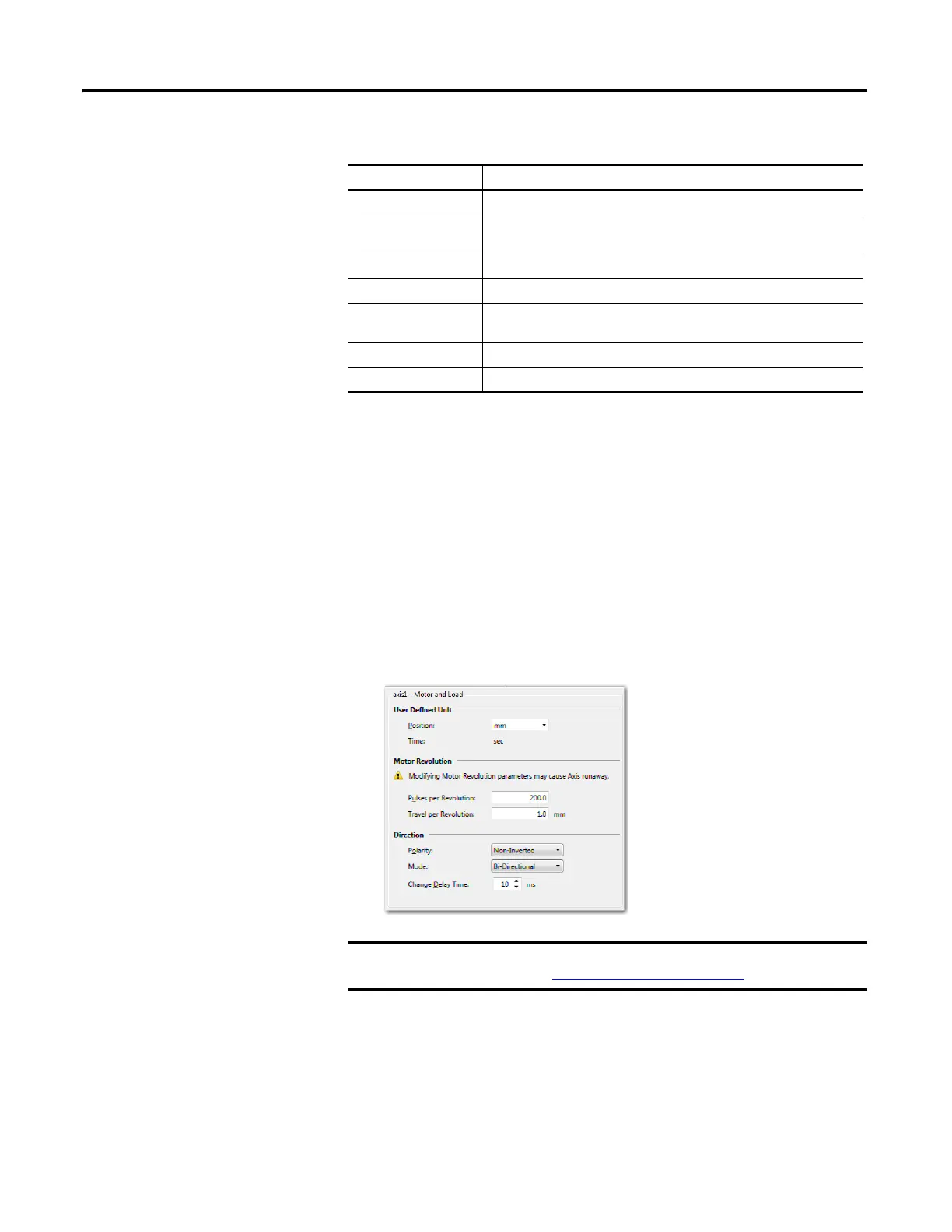
Motor and Load
Edit the Motor Load properties as defined in the table.
- Active Level Set as High (default) or Low.
Drive ready input Servo Ready Input Enable flag.
Check the option box to enable the input.
- Input The list of digital input variables. Select an input.
- Active Level Set as High (default) or Low.
Touch probe input Configure whether an input for touch probe is used.
Check the option box to enable touch probe input.
- Input List of digital input variables. Select an input
- Active Level Set the active level for touch probe input as High (default) or Low.
Certain parameters for Motor and Load are Real values. For more
information, see Real Data Resolution
on page 118
General Parameters
Parameter Description and Values

 Loading...
Loading...







