324 Rockwell Automation Publication 2080-UM002K-EN-E - March 2019
Appendix F PID Function Blocks
How to Autotune
Before you autotune, you need to:
• Verify that your system is constant when there is no control. For example,
for temperature control, process value should remain at room temperature
when there is no control output.
• Configure the set point to 0.
• Set Auto Input to False.
• Set the Gain parameter as follows:
• Set the AT_Parameter as follows:
During autotune, the controller will automatically set the process value to zero.
To autotune, perform the following steps:
1. Set the Initialize input to TRUE.
2. Set the AutoTune input to TRUE.
3. Wait for the Process input to stabilize or reach a steady state.
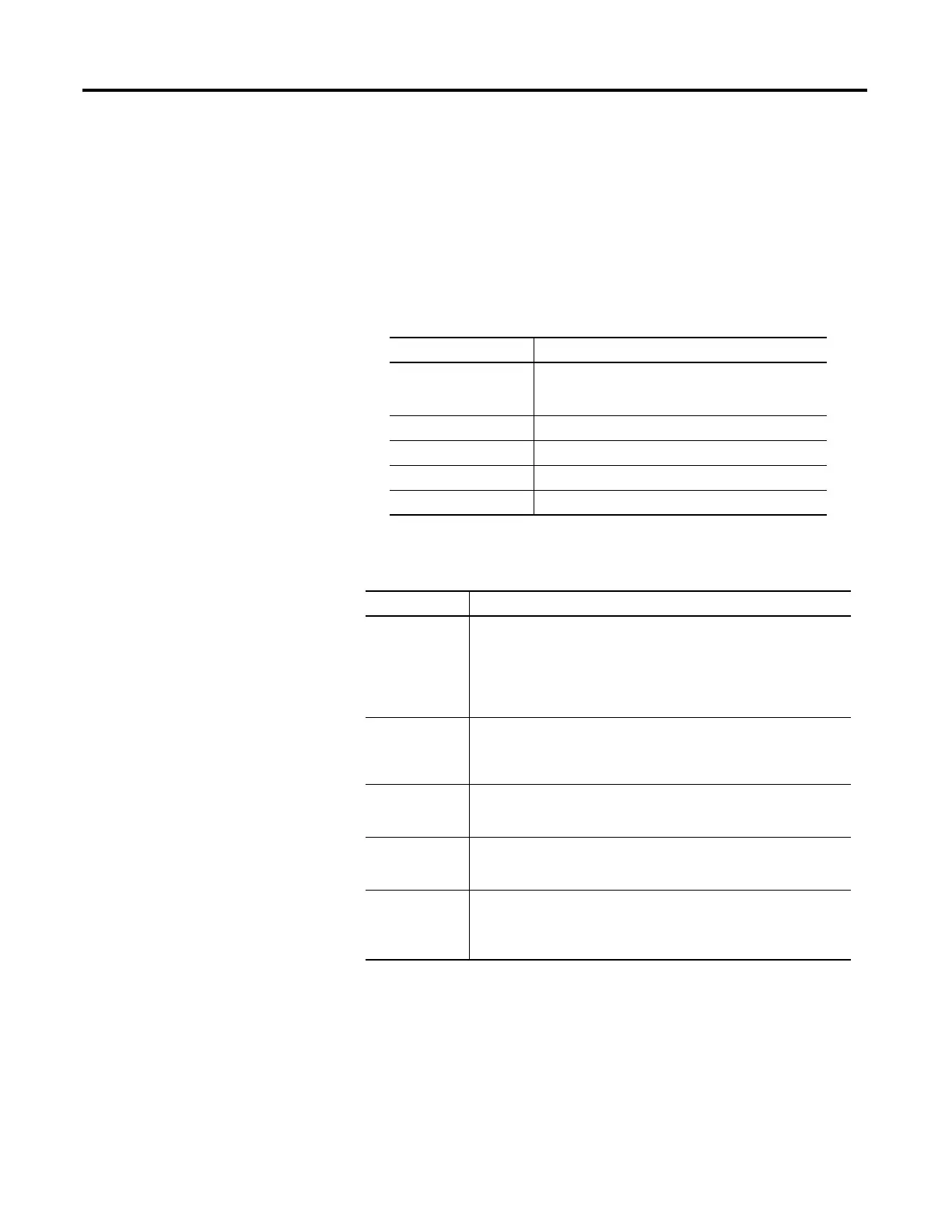
GAIN Parameter Values
GAIN Parameter Value
DirectActing According to operation:
TRUE (for example, Cooling), or
FALSE (for example, Heating)
DerivativeGain 0.5
ProportionalGain 0.0001
TimeIntegral 0.0001
TimeDerivative 0.0
AT_Parameter Values
AT Parameter Recommendation
Load Every ‘Load’ provides a saturated process value over a period of time.
Adjust the load to the value for the saturated process value you want.
IMPORTANT: If a load of 40 gives you a process value of 30 °C over a
period of time, and you want to tune your system to 30 °C, you should set
the load to 40.
Deviation This parameter plays a significant role in the autotune process. The
method of deriving this value is explained later in this section. It is not
necessary to set this parameter prior to autotuning. However, if you
already know the deviation, it is fine to set it first.
Step Step value should be between 3*Deviation and ½ load. The step provides
an offset for the load during autotuning. It should be set to a value high
enough to create a significant change in process value.
ATDynamSet Set this value to a reasonably long time for the autotune process. Every
system is different, so allow more time to a system with a process value
that takes longer to react to change.
ATReset Set this parameter to TRUE to reset the output to zero after the autotune
process completes.
Set this parameter to FALSE to leave the output at load value after the
autotune process completes.