Rockwell Automation Publication 2080-UM002K-EN-E - March 2019 319
PID Function Blocks Appendix F
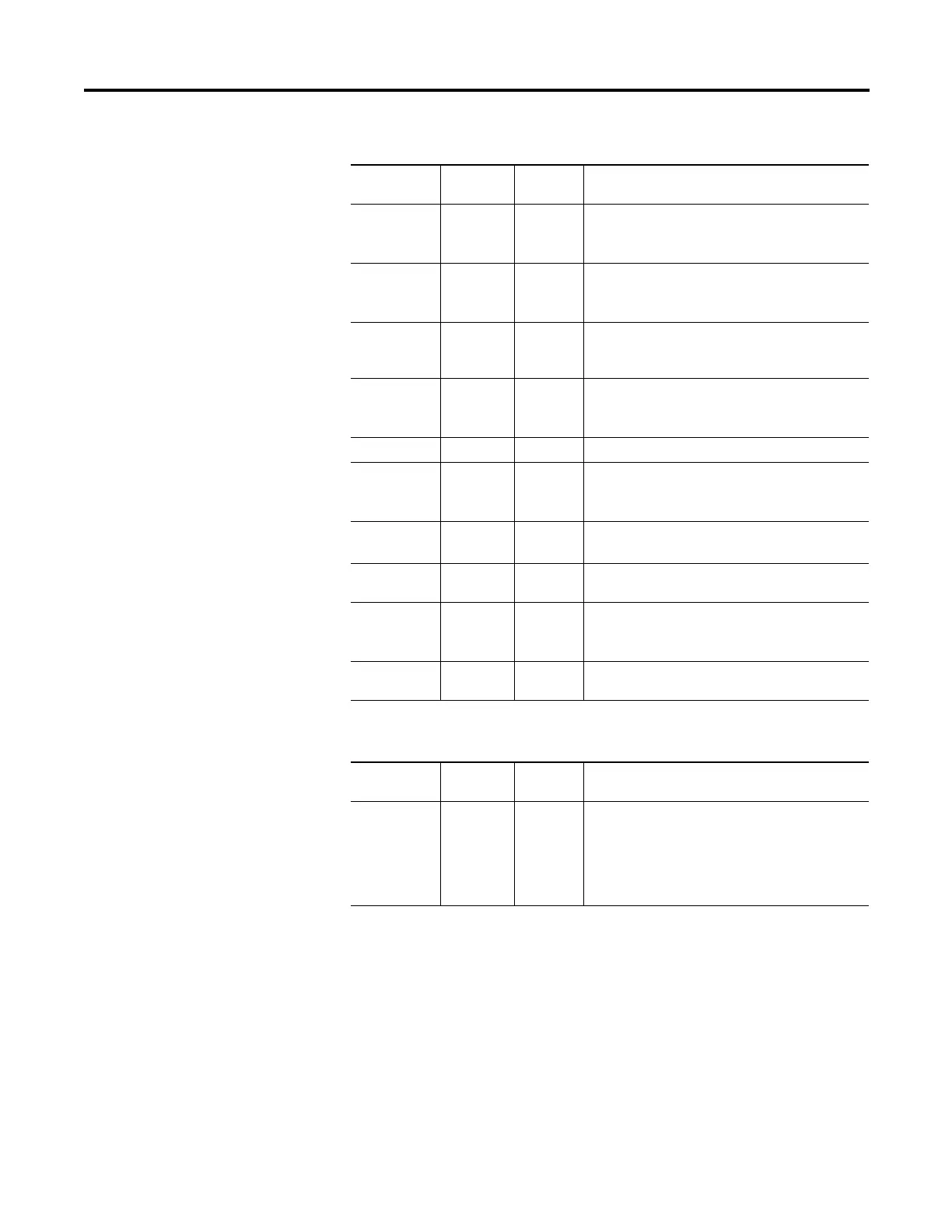
CVMin Input REAL Control value minimum limit.
If CV < CVMin, then CV = CVMin.
If CVMin > CVMax, and error occurs.
CVMax Input REAL Control value maximum limit.
If CV > CVMax, then CV = CVMax.
If CVMax < CVMin, an error occurs.
Gains Input PID_GAIN
S
Gains of PID for controller.
Use the PID_GAINS data type to configure the Gains
parameter.
Control Input BOOL Control direction of the process:
TRUE = Direct acting, such as Cooling.
FALSE = Reverse acting, such as Heating.
Llnit Input BOOL Reserved for future use.
Active Output BOOL Status of the PID controller:
TRUE = PID state is running.
FALSE = PID state is stopped.
CV Output REAL The control value output.
If any error occurred, CV is 0.
AbsoluteError Output REAL Absolute error is the difference between process
value (PV) and setpoint (SV) value.
Error Output BOOL Indicates the existence of an error condition.
TRUE = PID has an error.
FALSE = PID has no errors.
ErrorID Output USINT A unique numeric that identifies the error. The errors
are defined in PID error codes.
GAIN_PID Data Type
Parameter Parameter
Type
Data Type Description
Kc Input REAL Controller gain for PID.
Proportional and Integral are dependent on this gain
(>= 0.0001).
Increasing Kc improves response time but also
increases overshoot and oscillation of the PID.
If Kc is invalid, an error occurs.
PID Arguments
Parameter Parameter
Type
Data Type Description