Scale Blocks 2-159
Parameter Links
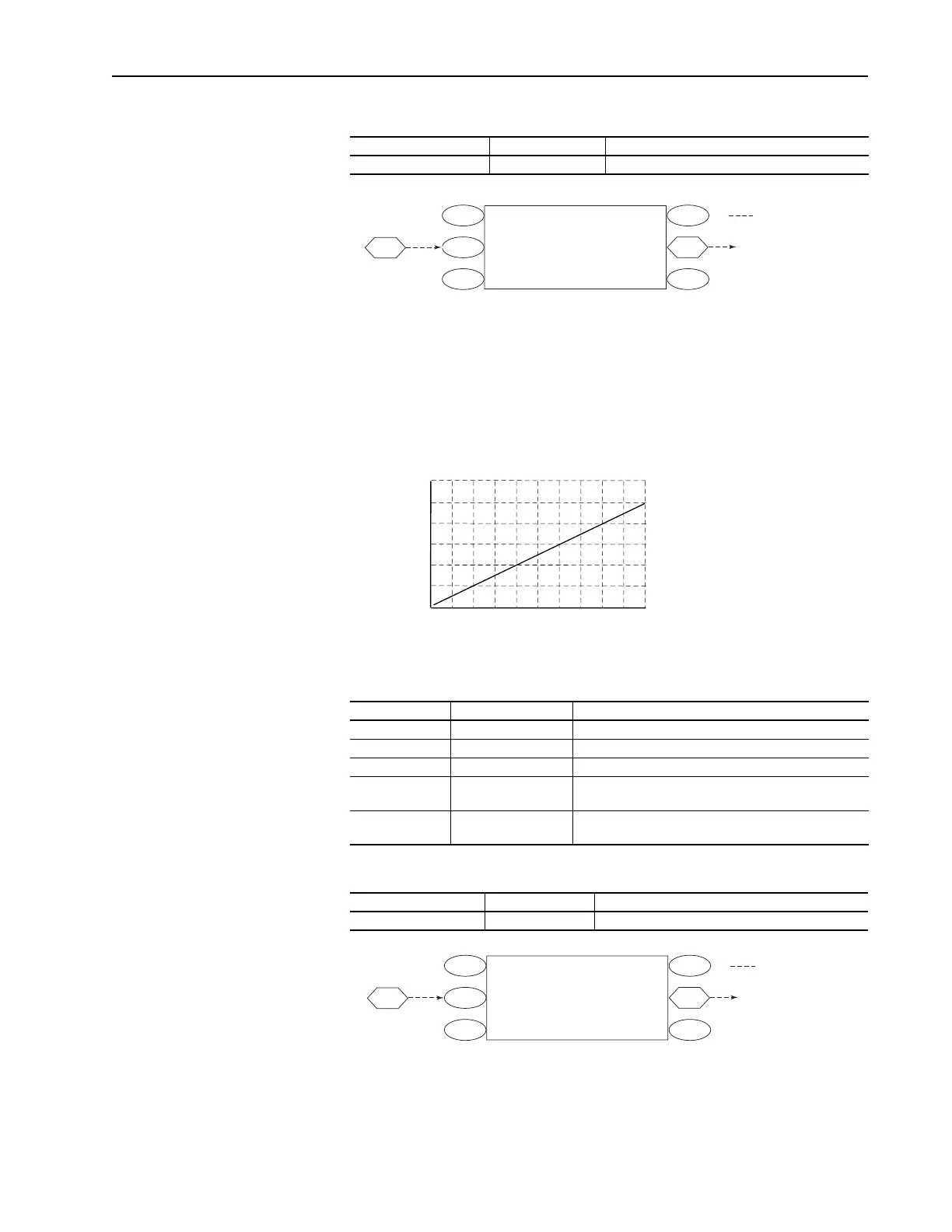
Example Configuration #3
In this configuration Analog In 2 is a –10V to +10V signal which
corresponds to –800% to +800% motor torque from another drive. We want
to use the –200% to +200% range (–2.5V to +2.5V) of that motor torque
and correspond it to –100% to +100% of the PI Reference.
Parameter Settings
Parameter Links
Destination Parameter Source Parameter Description
[Scale1 In Value] [Encoder Speed] We are scaling Encoder Speed
Parameter Value Description
[Scale 1 In Hi] 2.5 V 2.5 V = 200% torque from other drive
[Scale 1 In Lo] –2.5V –2.5 V = –200% torque from other drive
[PI Reference Sel] 25, Scale Block1 Out The PI Reference becomes the output of the scale block
[PI Reference Hi] 100 % 100% PI Reference corresponds to 200% torque from
other drive
[PI Reference Lo] –100 % –100% PI Reference corresponds to –200% torque from
other drive
Destination Parameter Source Parameter Description
[Scale1 In Value] [Analog In2 Value] We are scaling Analog In 2 value
477
476
478
343
344
415
481
Encoder Speed
Scale1 In Hi Analog Out1 Hi
Scale1 In Value
Analog Out1 Lo
Scale1 Out
Value
Analog Out1
= Link
Scale1 In Lo
-100
-2.5
-1.5
-0.5
0.5
1.5
2.5
-80 -60 -40 -20 0 20 40 60 80 100
PI Reference
Scale1 In Value =
Analog In2 Value (Volts)
477
476
478
460
461
2
481
Analog In2 Value
Scale1 In Hi PI Reference Hi
Scale1 In Value
PI Reference Lo
Scale1 Out
Value
PI Reference
= Link
Scale1 In Lo

 Loading...
Loading...








